Yaskawa MP920 Motion Module User Manual
Page 334
7 PO-01 Module Specification and Handling
7.3.1 Motion Fixed Parameters
7-32
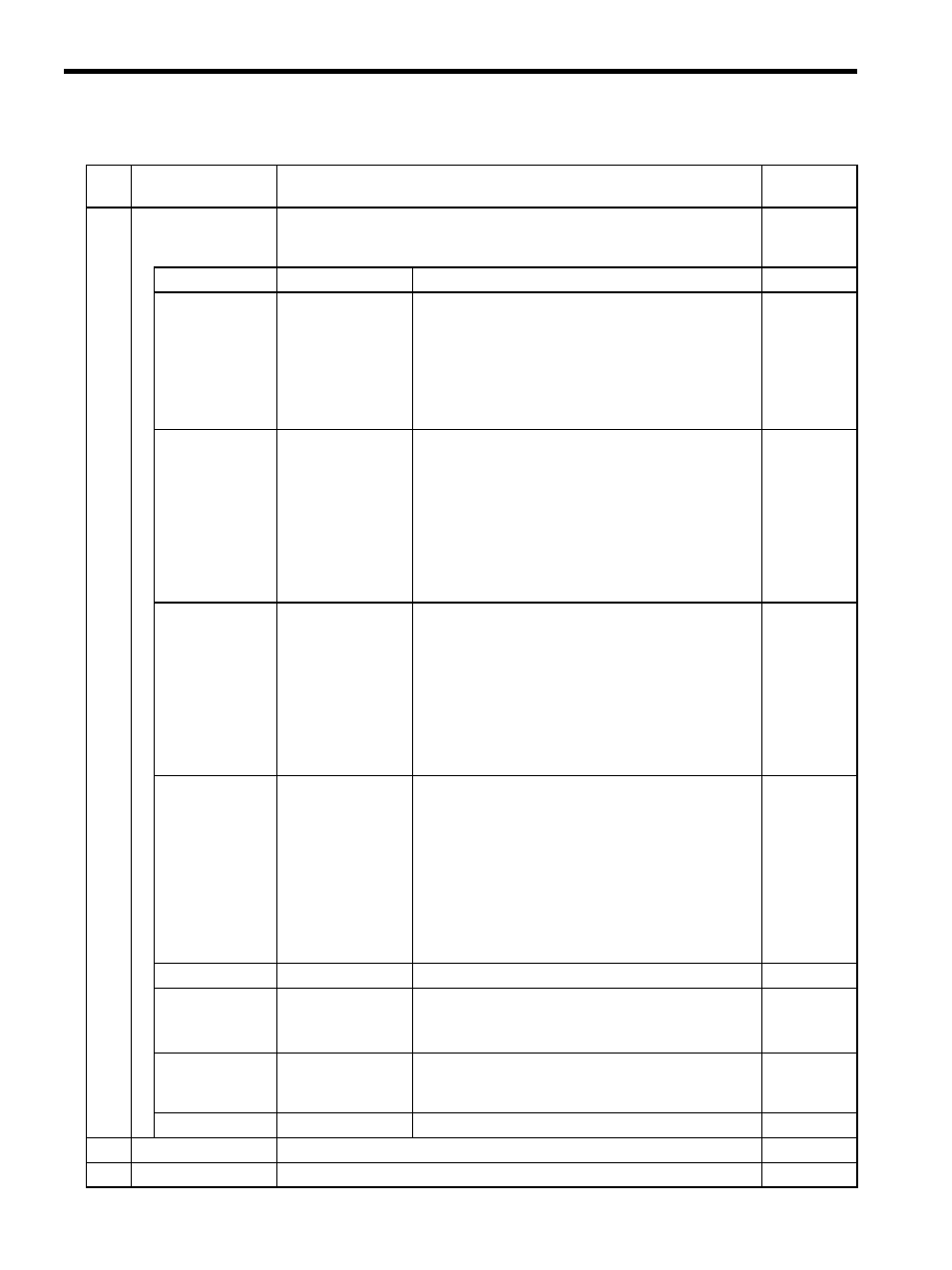
14
Additional Function
Selections
(AFUNCSEL)
Set additional functions, such as the signal type used and signal functions.
−
Bits 0 to 1
Not used.
−
−
Bit 2
Limit Switch Signal
Selection
(LIMITSEL)
Set whether to use OB0IF or DI signal DI05 as the
limit switch signal when returning to the zero point.
0: Use OB01F.
1: Use the DI signal (DI5 deceleration limit signal).
When using OB01F, the external signal (DI signal
input by the LIO_01 or other Module) must be connected
(i.e., programmed) to OB01F in the user program.
0
(OB01F)
Bit 3
Reverse Limit Signal
Selection for Zero
Point Return
(LMT_LSEL)
Set whether to use OB21C (= 0) or DI signal DI2 (=
1) as the reverse limit signal for zero point return when
zero point return signals (DEC1 + LMT + ZERO signals)
are received.
0: Use OB21C.
1: Use the DI signal.
When using OB21C, the external signal (DI signal
input by the LIO-01 or other Module) must be connected
(i.e., programmed) to OB21C in the user program.
0
(OB21C)
Bit 4
Forward Limit Sig-
nal Selection for
Zero Point Return
(LMT_RSEL)
Set whether to use OB21D (= 0) or DI signal DI03 (=
1) as the forward limit signal for zero point return when
zero point return signals (DEC1 + LMT + ZERO signals)
are received.
0: Use OB21D.
1: Use the DI signal.
When using OB21D, the external signal (DI signal
input by the LIO-01 or other Module) must be connected
(i.e., programmed) to OB21D in the user program.
0
(OB21D)
Bit 5
Emergency Stop (DI)
Signal Selection
(EMGSEL)
Set the stop method used when an emergency stop signal
(DI04) is input.
0: Emergency stop (H/W)
An immediate stop will be performed by hardware
without software (stop by hardware).
1: Deceleration to a stop (S/W)
A deceleration to a stop will be performed according to
the setting of motion setting parameter No. 14: Linear
Deceleration Time Constant (OW0D) (stop by
software).
0
(Emergency
stop)
Bit 6
Not used.
−
0
Bit 7
Motion Command
Code Selection
(MCMDSEL)
Always set this bit to 1.
0: Not used
1: Used
1
(Used)
Bit 8
Excitation ON
Output Signal
Polarity Selection
0: Positive logic
1: Negative logic
0
Bits 9 to 15
Not used.
−
−
15
Not used.
−
−
16
Not used.
−
−
Table 7.9 Motion Fixed Parameters (cont’d)
No. Name
Description
Factory
Setting