Yaskawa MP920 Motion Module User Manual
Page 230
5 SVA Module Specifications and Handling
5.4.3 Motion Monitoring Parameters
5-88
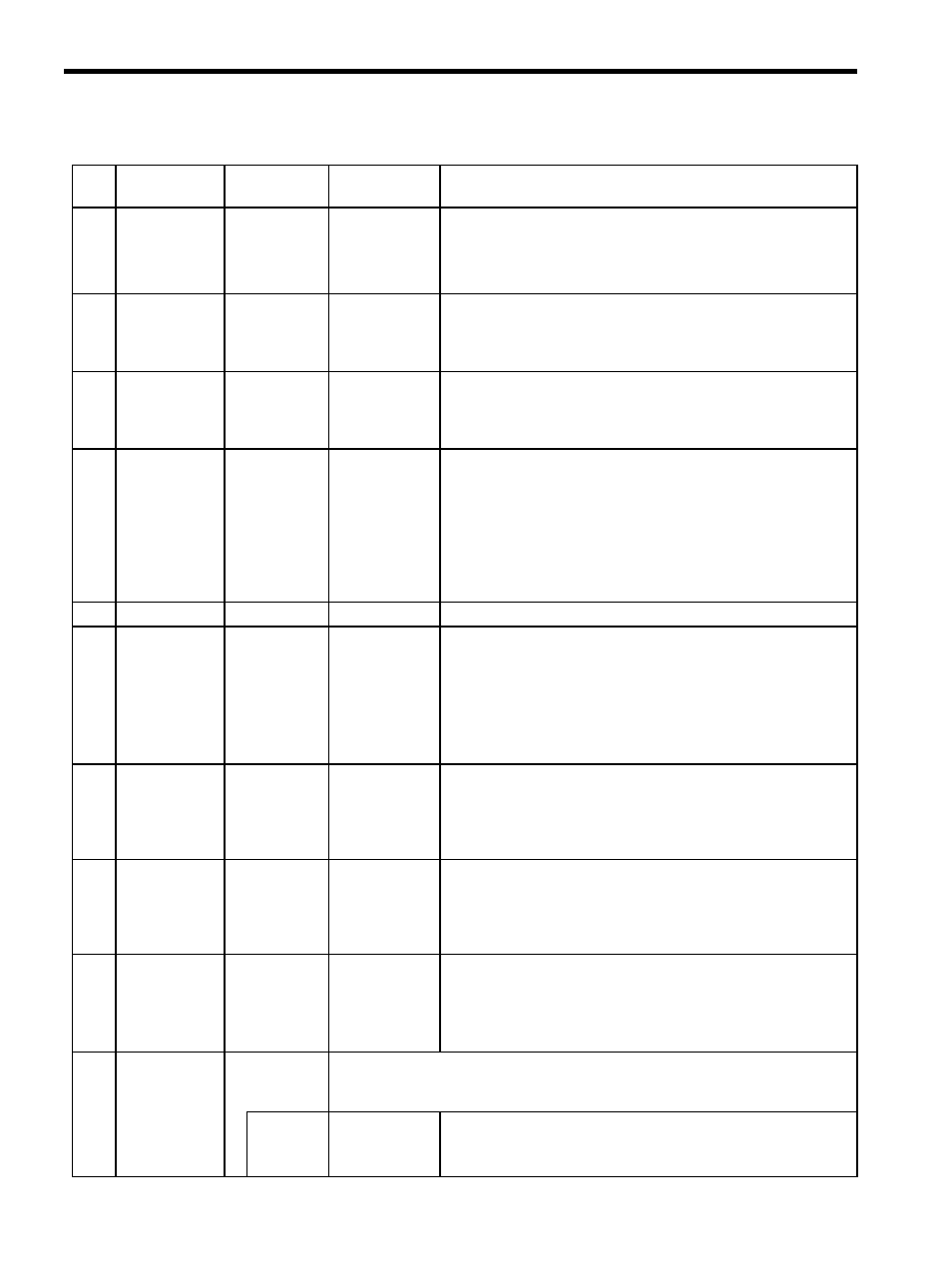
9
Machine Coor-
dinate System
Feedback
Position
IL08
-2
31
to 2
31
-1
Indicates the current monitor position.
It is valid when an H or L Drawing is executed.
Note: It is not valid when an A Drawing is executed.
See 2 of Supplemental Explanation 4.
11
Position Error
(PERR)
IL0A
-2
31
to 2
31
-1
Indicates the position error (number of pulses held).
(Position error = target position
− current position for each scan). It is
valid in Zero Point Return Mode, Position Control Mode, and Phase
Control Mode.
13
Speed Refer-
ence Output
Monitor
(SPDREF)
IW0C
-32768 to 32767
Indicates the value output at the servo drive as the speed reference
output value.
14
Speed Monitor
(NFB)
IW0D
-32768 to 32767
Scales and indicates the A/D conversion results of input analog signals
at the input voltage at 100% speed monitor (A/D) setting.
Speed monitor value = (A/D input voltage
× 10000) / input voltage
setting at 100% speed monitor (A/D)
Example:
Input voltage setting at 100% speed monitor (A/D) = 6 V
When the actual A/D input voltage = 3 V, then (3 V
× 10000) / 6.0 V =
5000 is indicated.
15
Not used.
IW0E
−
−
16
Out of Range
Parameter
Number
(ERNO)
IW0F
Motion setting
parameter:
1 to 65
Motion fixed
parameter:
101 to 148
Indicates the most recent setting parameter number that exceeded the
range in OW00 to OW3F motion setting parameter or motion
fixed parameter settings.
• Motion setting parameters: 1 to 65
• Motion fixed parameters: 101 to 148
When motion fixed parameters are used, this parameter indicates the
parameter number plus 100.
17
Cumulative
Rotations from
Absolute En-
coder
(ABSREV)
IW10
-2
31
to 2
31
-1
Indicates the cumulative number of rotations received from the abso-
lute encoder.
It is valid only when using an absolute encoder.
19
Initial Incre-
mental Pulses
from Absolute
Encoder
(IPULSE)
IL12
-2
31
to 2
31
-1
Indicates the initial number of incremental pulses received from the
absolute encoder.
It is valid only when using an absolute encoder.
21
Motion Com-
mand Re-
sponse Code
(MCM-
DRCODE)
IW14
0 to 65535
Indicates the OW20: Motion Command Code that is currently
executing.
Refer to OW20 for details on motion commands.
It is valid in Position Control Mode when an OW20: Motion
Command Code is used.
22
Motion Com-
mand Status
(MCMDSTS)
IW15
Monitors the executing status of an OW20: Motion Command Code.
It is valid in Position Control Mode when an OW20: Motion Command Code is used.
The bit configuration is described below.
Bit 0
Command Exe-
cuting Flag
(BUSY)
Indicates the motion command status. This bit is used for abort status.
0: READY (completed)
1: BUSY (processing)
Table 5.7 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description