Yaskawa MP920 Motion Module User Manual
Page 353
7.3 PO-01 Parameters
7-51
7
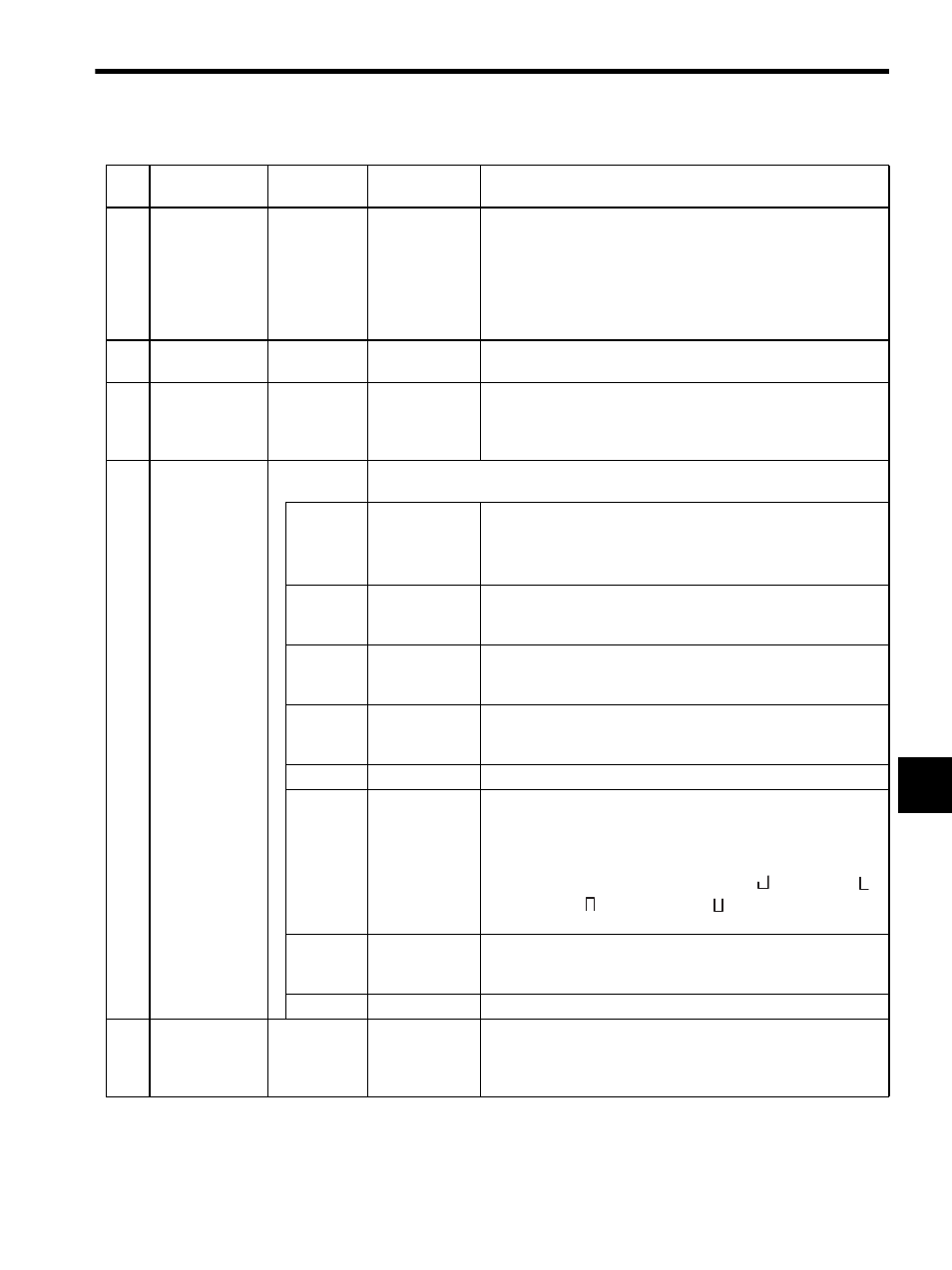
16
Out of Range
Parameter Num-
ber (ERNO)
IW0F
1. Motion
setting
parameter
1 to 65
2. Motion fixed
parameter
101 to 148
Indicates the most recent setup parameter number that exceeded the
range in OW00 to OW3F motion setting parameter or
motion fixed parameter settings.
• Motion setting parameters: 1 to 65
• Motion fixed parameters: 101 to 148
17 to
20
Not used.
IW10 to
IW13
−
−
21
Motion Com-
mand Re-
sponse Code
(MCMDRCODE)
IW14
0 to 65535
Indicates the OW20: Motion Command Code that is currently
executing.
Refer to OW20 for details on motion commands.
22
Motion Com-
mand Status
(MCMDSTS)
IW15
Monitors the executing status of an OW20: Motion Command Code. The bit config-
uration is described below.
Bit 0
Command
Executing Flag
(BUSY)
Indicates the motion command status. This bit is used for abort sta-
tus.
0: READY (completed)
1: BUSY (processing)
Bit 1
Command Hold
Completed Flag
(HOLDL)
Turns ON when a HOLD is completed. Refer to individual motion
functions for details on the HOLD function.
Bit 2
Distribution
Completed
(DEN)
Turns ON when the amount of movement cleared is completed.
Bit 3
Zero Point Set-
ting Completed
(ZSET)
Turns ON when the zero point setting (ZSET) has been executed by
OW20: Motion Command Code.
Bit 4
Not used.
−
Bit 5
Command Error
End (FAIL)
Turns ON if an alarm occurs while a movement (positioning, feed,
etc.) command is being executed.
Operation cannot continue once this bit turns ON.
Set Motion Command Code (OW20) to “NOP” for at least one
scan. The PO-01 Module LEDs will indicate (
) (first axis), (
)
(second axis), (
) (third axis) and (
)(fourth axis) if this bit is
ON.
Bit 6
Zero Point
Return Com-
pleted (ZRNC)
Turns ON when zero point return or zero point setting has been com-
pleted. It turns OFF when zero point return begins.
Bits 7 to 15 Not used.
−
23
Number of Digits
Below Decimal
Monitor
(DECNUMM)
IW16
0 to 5
Indicates motion fixed parameter No. 18: Number of Digits Below
Decimal Point.
Table 7.11 Motion Monitoring Parameters (cont’d)
No. Name
Register
No.
Setting
Range/
Bit Name
Description