Yaskawa MP920 Motion Module User Manual
Page 75
2.4 Position Control Using Motion Commands
2-49
2
4. Set RUN Servo ON (RUN) to ON (bit 0 of OW01).
For the PO-01 Module, set Excitation ON (RUN) to ON.
5. Set positioning (POSING = 1) in the motion command code (OW20).
The specified motion parameters perform positioning for the axis. Even during position-
ing, the motion parameter settings can be changed.
The positioning command operations are as follows:
a) Operation Start
Servo ON (bit 0 of OW01).
Set the positioning (POSING = 1) to motion command code (OW20).
b) Feed Hold
Set Hold (bit 0 of OW21) to ON.
At feed hold completion, HOLDL (bit 1 of IW15) turns ON.
c) Feed Hold Release
Set Hold (bit 1 of OW21) to OFF. Positioning resumes.
d) Abort
Set Abort (bit 1 of OW21) to ON, or set NOP (= 0) in the motion command code.
Busy (bit 0 of IW15) turns ON during abort processing, and turns OFF at com-
pletion of the abort.
Note: When the abort has been completed and released (ABORT turns
OFF), the following occurs:
• When the Position Reference Type (bit 14 of OW01) is the absolute position
mode (= 0), positioning resumes in the direction of the Position Reference Set-
ting (OL12).
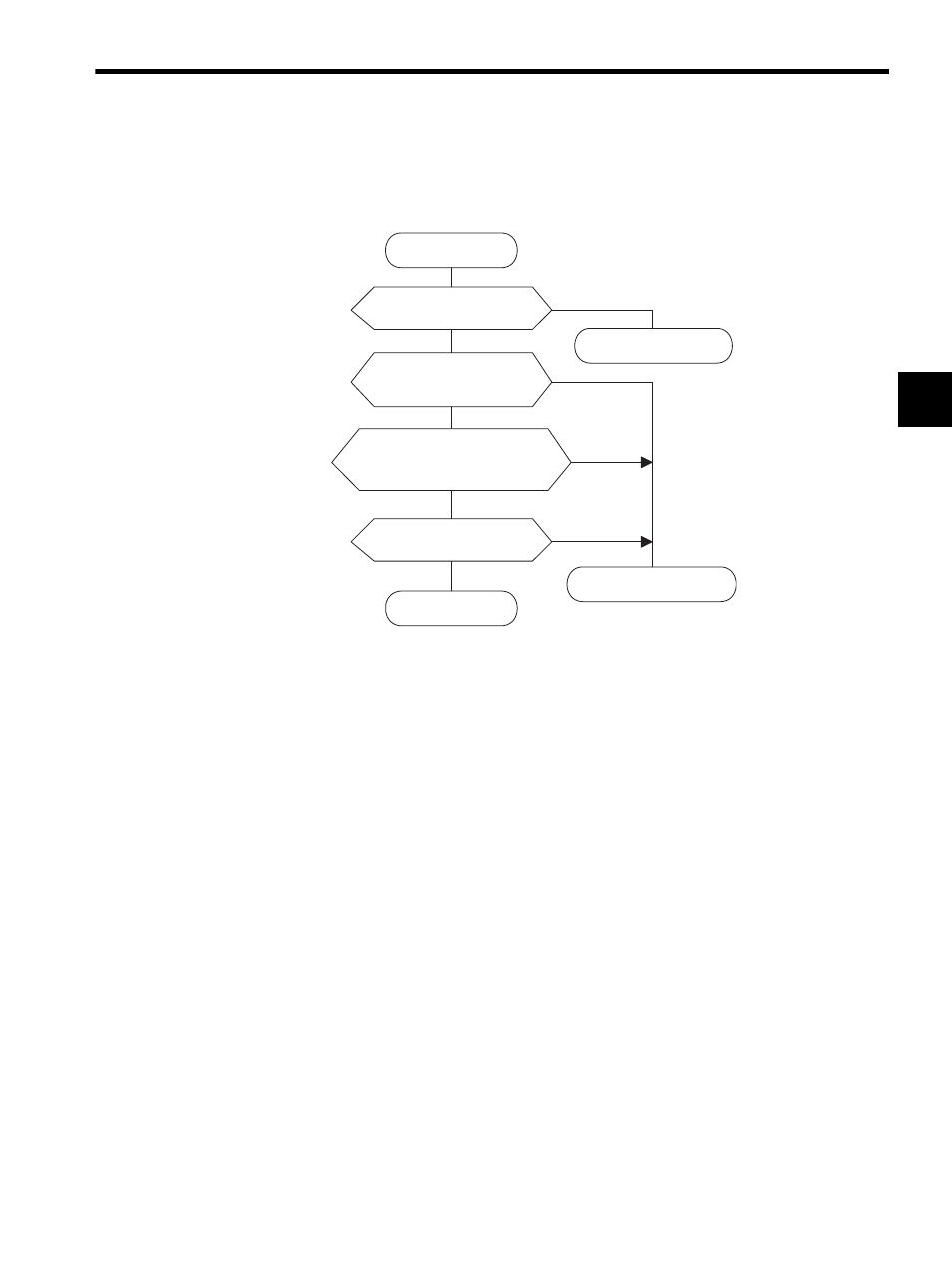
YES
YES
YES
NO
NO
NO
YES
NO
POSING
Start condition check
Control mode
= position control mode?
Motion command status
Busy = OFF?
Return (OK)
Return (NG)
Return (NG)
Motion command code
= NOP||POSING||
ENDOF_INTERPOLATE?
Motion command response
= NOP||POSING||
INTERPOLATE
ENDOF_INTERPOLATE?