Sgda and sgdb – Yaskawa MP920 Motion Module User Manual
Page 393
9.2 Overtravel Function
9-13
9
Servomotor Stop Procedure Selection with Overtravel
Set the following parameters according to the Servomotor stop procedure if overtravel is set
to ON. Select the procedure for stopping if P-OT or N-OT is input while the Servomotor is
running.
SGDA and SGDB
Select the stopping procedure as well as the procedure after stopping if the OT signal is
input while the Servomotor is running.
Selects the stopping procedure and procedure after stopping when the servo turns OFF.
Parameter No.
Description
Setting
Meaning
Factory
Setting
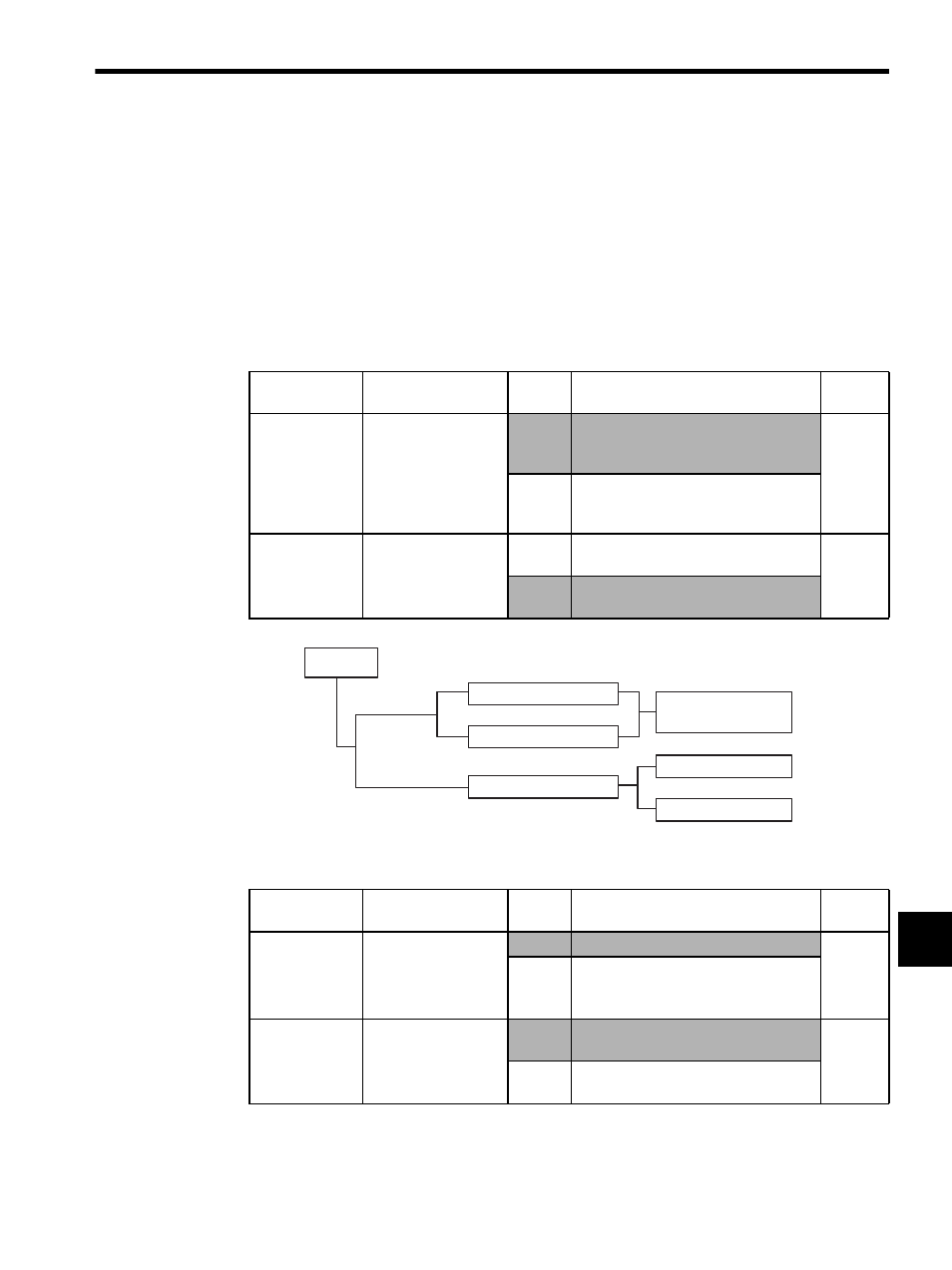
Cn-01 bit 8
Servomotor stopping
procedure for over-
travel
0
Same stopping procedure as for servo
OFF: Dynamic brake or free run to a stop
(select using CN-01 bit 6)
0
1
Decelerate to a stop at the preset torque
(setting: CN-06 EMGTRQ emergency
stop torque)
Cn-01 bit 9
Processing after stop-
ping Servomotor for
overtravel
0
Servo turns OFF after decelerating to a
stop.
0
1
Zero clamping after decelerating to a
stop.
Dynamic brake to a stop
Free runs to a stop
Stopping procedure
After stopping
Cn-01
Bit 8 = 0
Overtravel
Bit 8 = 1
Zero clamping
Servo OFF
Bit 6 = 0
Bit 6 = 1
Decelerate to a stop
Dynamic brake
released (servo OFF)
Bit 9 = 0
Bit 9 = 1
Parameter No.
Description
Setting
Meaning
Factory
Setting
Cn-01 bit 6
Servomotor stopping
procedure for servo
OFF
0
Stops by dynamic brake (DB).
0
1
Free runs to a stop.
Servomotor turns OFF and the machine
stops by mechanical friction.
Cn-01 bit 7
Processing after stop-
ping Servomotor for
servo OFF
0
The dynamic brake is released after it is
used for stopping.
0
1
The dynamic brake is not released after it
is used for stopping.