Yaskawa MP920 Motion Module User Manual
Page 342
7 PO-01 Module Specification and Handling
7.3.2 Motion Setting Parameters
7-40
2
RUN
Command
Settings
(SVRUNCMD)
OW01
Set the output signal from the PO-01 Module to the driver as well as the RUN mode
required for motion control. The bit configuration is described below.
Bit 0
Excitation ON
signal (RUN)
(DO0)
Used as the excitation ON signal for the driver. “1”
is output from DO0 if this bit is set to 1 when
SVCRDY (IB007) is set to ON.
0: OFF, 1: ON
0
Bits 1 to 3
DO1 to DO3
Used as an general-purpose DO.
0: OFF, 1: ON
0
Bits 4 to
10
Not used.
Set to “0.”
0
Bit 11
Emergency
Stop/Decelera-
tion to a Stop
Reset
(EMRST)
Cancels emergency stop and deceleration stop sig-
nals.
This bit is valid when RUN (bit 0 of OW01) is
set to OFF.
0
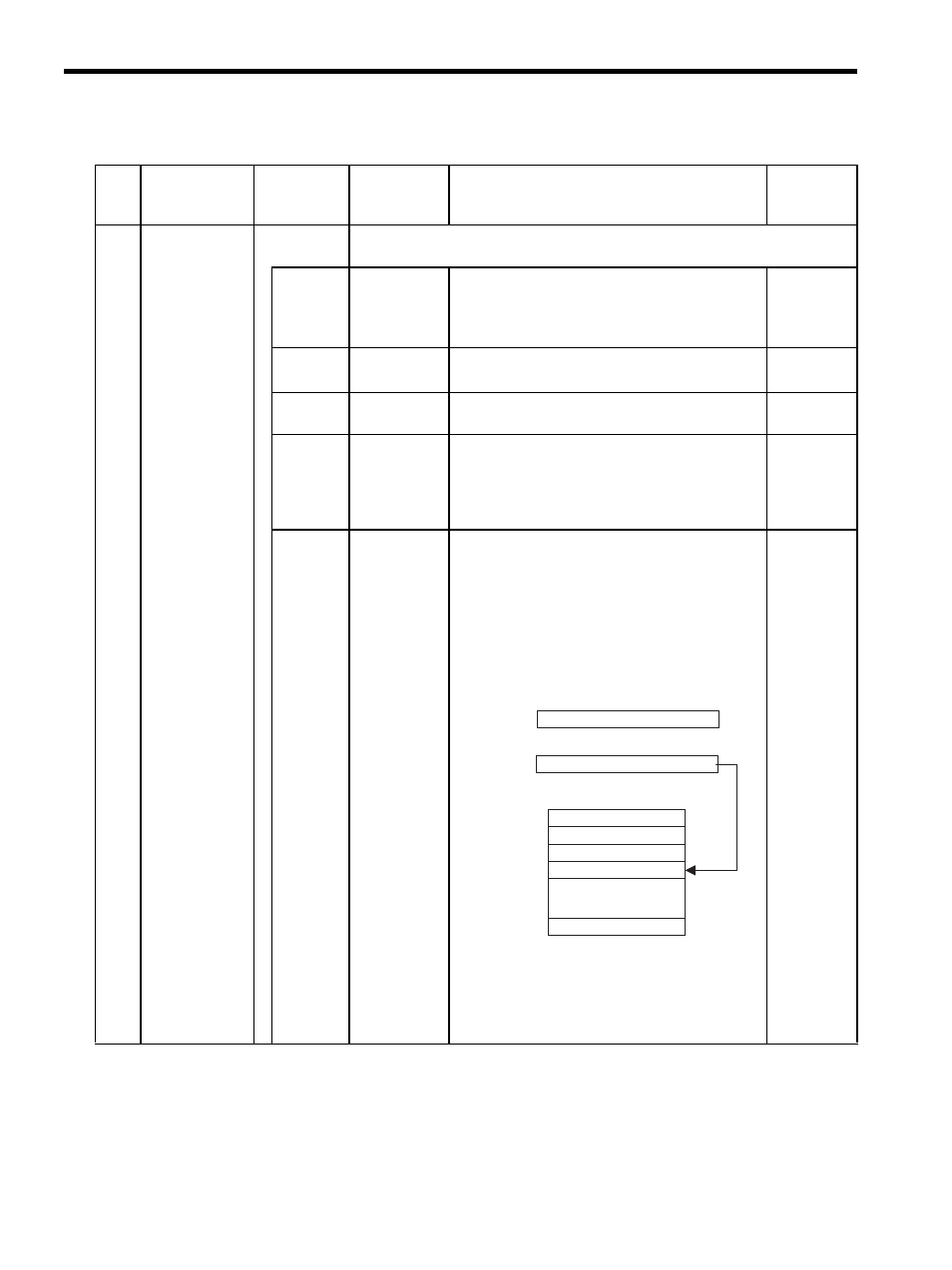
Bit 12
Position Ref-
erence Value
Selection
(USE_BUF)
Set the reference method that is used for position ref-
erence data.
0: OL12
Use OL12 as directly as position reference
data.
1: Position buffer
Use OL12 indirectly as the position buffer
number.
• The position buffer is located in the PO-01 Mod-
ule and must be written in the initial drawing at
startup.
• Refer to OB21E, OB21F, and OL3A
for details on writing to the position buffer.
0
Table 7.10 Motion Setting Parameters (cont’d)
No. Name
Register
Number
Setting
Range/
Bit Name
Description
Factory
Setting
Position reference
OL
12
Position buffer
Position reference data 1
2
Position reference data 100
256
100
Directly
specified
Indirectly
specified
Position buffer pointer