Yaskawa MP920 Motion Module User Manual
Page 39
2.2 Control Modes
2-13
2
1. Set the motion fixed parameters according to the user’s machine.
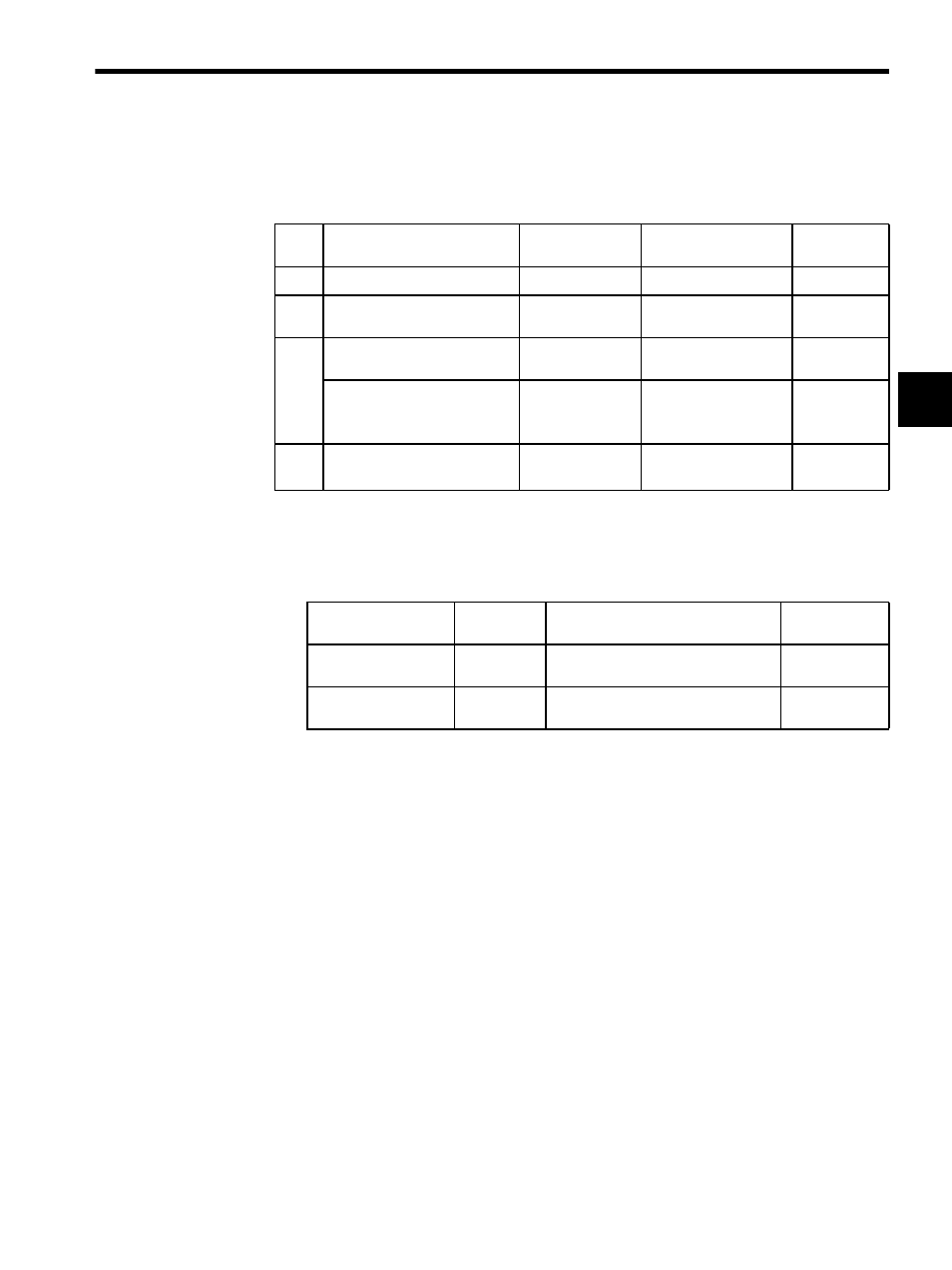
Table 2.3 shows the related parameters when the torque reference output mode is used.
* 1. Valid only with an SVB-01 Module.
* 2. Valid only with an SVA-02A Module.
2. Set the motion parameters to be used in the torque reference output mode.
3. Select the Torque Reference Output Mode (TCON) (bit 1 of OW00).
4. To start operation, set the RUN Servo ON (RUN) to ON (bit 0 of OW01).
The torque reference and the speed limit reference will be output for the axis according
to the specified motion parameters.
Even while the torque reference output mode is being selected, the motion parameter
settings can be changed.
5. To stop operation, set the RUN command (RUN) and the torque reference output mode
(TCON) to OFF.
Table 2.3 Examples of Fixed Parameters
No.
Name
Setting Range
Meaning
Setting
Example
7
Rated Motor Speed Setting
1 to 32000
Rated motor speed
3000 min
-1
8
Number of Feedback Pulses per
Motor Rotation
4 to 65532
Number of pulses
before multiplication
2048
9
D/A Output Voltage at 100%
Speed
0.001 to 10.000
0.001 = 0.001 V
1 = 1 V
6.000 V
Number of Feedback Pulses per
Motor Rotation
(For high-resolution)
*1
4 to 2147483647
1 = 1 pulse/rev
2048 pulses/
rev
10
D/A Output Voltage at 100%
Torque Limit
*2
0.001 to 10.000
0.001 = 0.001 V
1 = 1 V
3.000 V
Table 2.4 Examples of Setting Parameters
Name
Register No.
Meaning
Setting
Example
Torque Reference
Setting (TREF)
OW1B
Sets the torque reference value at
0.01%.
50.00
(50.00%)
Speed Limit Setting
(NLIM)
OW1C
Sets the speed limit value at 0.01%.
50.00
(50%)