Yaskawa MP920 Motion Module User Manual
Page 69
2.3 Position Control
2-43
2
* Valid only with an SVA-02A Module.
3. Select the Position Control Mode (PCON) (bit 2 of OW
00).
4. To start operation, set the RUN Servo ON (RUN) to ON (bit 0 of OW
01).
The axis is positioned according to the specified motion parameters.
Even during positioning, the motion parameter settings can be changed.
5. To stop position control, set the RUN command (RUN) and the position control mode
(PCON) to OFF.
The POSCOMP Positioning Completed Signal (bit 13 of IW
00) turns ON when the
axis enters the positioning completed range. Control continues even when the axis
enters the positioning completed range (the axis enters servo clamp status).
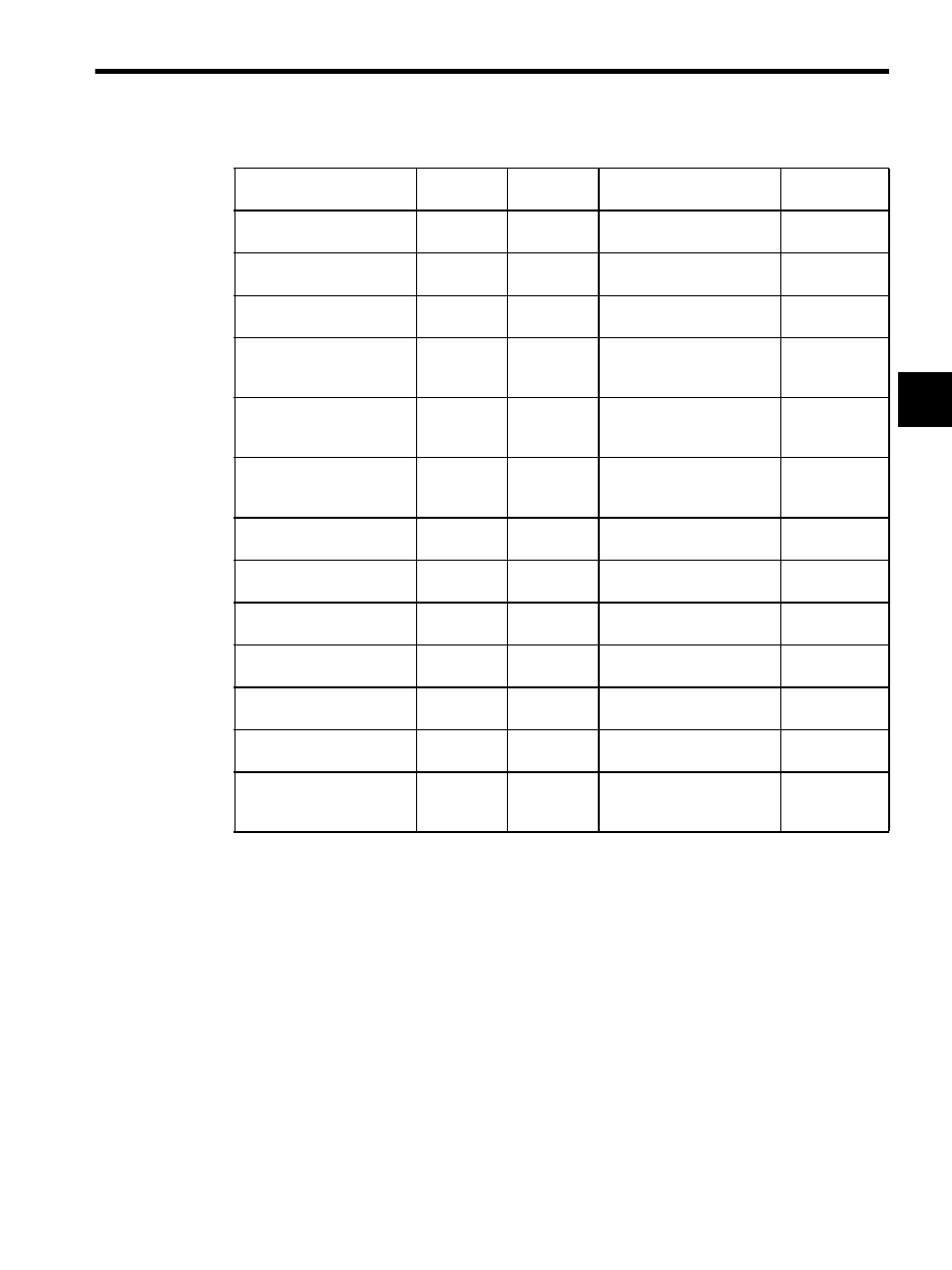
Table 2.20 Examples of Setting Parameters
Name
Register No.
Setting
Range
Meaning
Setting
Example
Positive Torque Limit
Setting (TLIMP)*
OW02
-327.68 to
327.67
0.01 = 0.01%
1 = 1%
-100.00
(-100.00%)
Positive Speed Limiter
Setting (NLIMP)
OW04
0.00 to
327.67
0.01 = 0.01%
1 = 1%
130.00
(130.00%)
Negative Speed Limiter
Setting (NLIMN)
OW05
0.00 to
327.67
0.01 = 0.01%
1 = 1%
130.00
(130.00%)
Machine Coordinate
System Zero Point Offset
Setting (ABSOFF)
OL06
-2
31
to 2
31
-1
1 = 1 reference unit
With pulse: 1 = 1 pulse
100 pulses
Linear Acceleration Time
Constant (NACC)
OW0C
0 to 32767
Linear acceleration time con-
stant (ms) at speed pattern
generation
1000
(1 second)
Linear Deceleration Time
Constant (NDEC)
OW0D
0 to 32767
Linear deceleration time
constant (ms) at speed
pattern generation
1000
(1 second)
Positioning Completed
Range Setting (PEXT)
OW0E
0 to 65535
1 = 1 reference unit
With pulse: 1 = 1 pulse
10 pulses
Error Count Alarm
Detection Setting (EOV)
OW0F
0 to 32767
1 = 1 reference unit
With pulse: 1 = 1 pulse
65535 pulses
Position Loop Gain Setting
(KP)
OW10
0.0 to 3276.7 0.1 = 0.1 /s
1 = 1 /s
30.0
(30.0 /s)
Filter Time Constant
(NNUM)
OW14
0 to 255
For simple S-curved acceler-
ation
0
Feed Forward Gain
Setting (Kf)
OW11
0 to 200
1 = 1%
0
Position Reference Setting
(XREF)
OL12
-2
31
to 2
31
-1
1 = 1 reference unit
With pulse: 1 = 1 pulse
10000 pulses
Speed Reference Setting
(NREF)
OW15
-327.68 to
327.67
Speed reference value
0.01 = 0.01%
1 = 1%
50.00 (50.00%)