Ladder logic program example – Yaskawa MP920 Motion Module User Manual
Page 106
2 Motion Control
2.4.8 Fixed Length Feed (STEP)
2-80
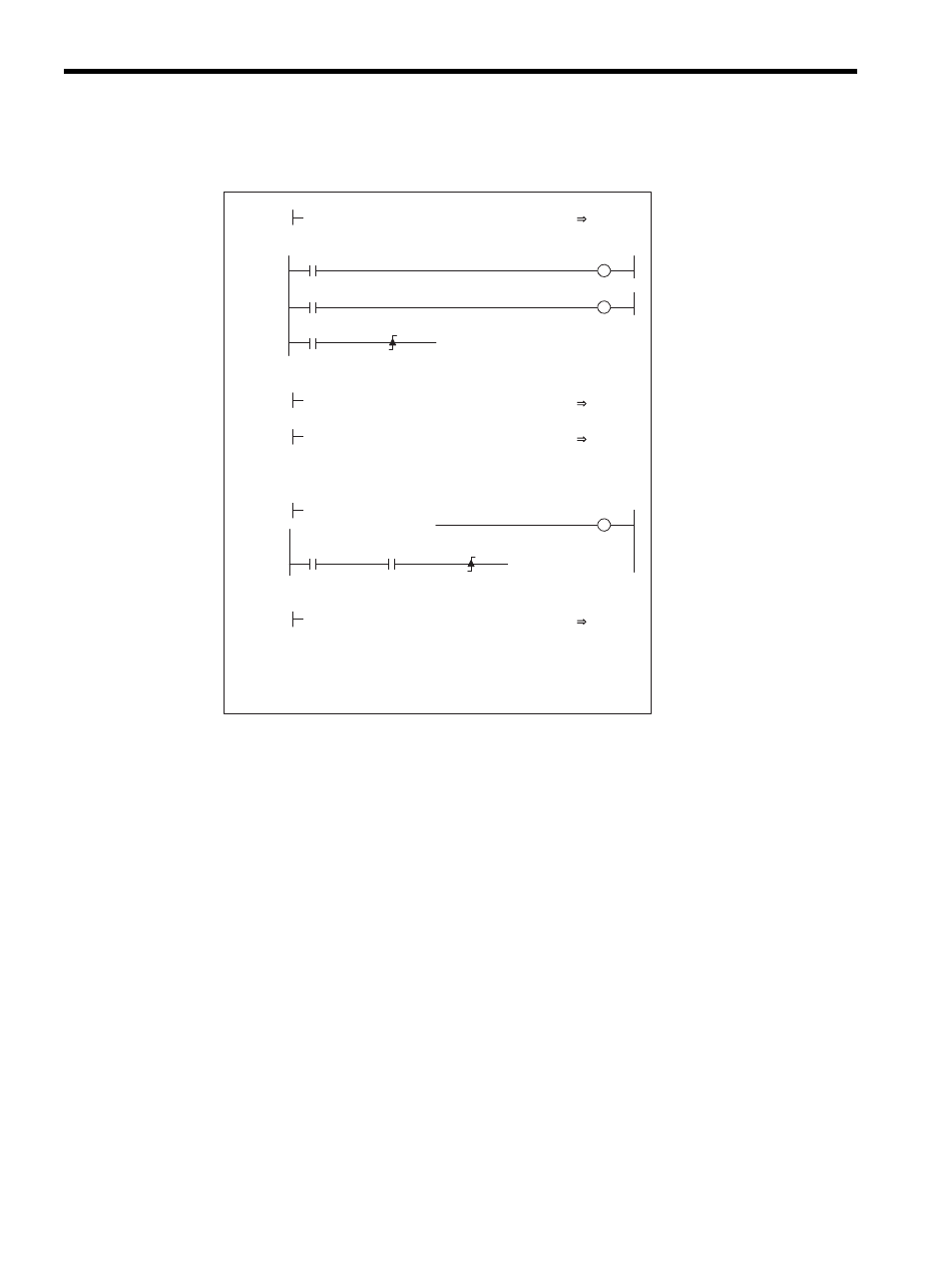
Ladder Logic Program Example
The example in the above illustration has been greatly simplified. In actual operation, each
register can be controlled from the user program.
H0104
RUNMOD
OWC000
1 0000
$ONCOIL
SB000004
IB00303
RUN
OBC0010
1 0002
1 0004
IB00304
1 0006
1 0008
IFON
MCMDRCOD
IWC014
1 0014
= 00008
DIRECTION
OBC0212
DB000010
00008
MCMDCODE
OWC020
2 0011
05000
STEP
OWC028
2 0009
1 0013
IEND
DB000020
POSCOMP
IBC000D
1 0017
DB000030
DB000020
1 0020
IFON
00000
MCMDCODE
OWC020
1 0021
1 0023
IEND
0 0024
DEND
Set the position control mode to ON.
Send RUN command to driver.
STEP travel distance: 2,000 pulses.
When IB00304 turns ON, STEP
feeding is begun and the axis is
moved by STEP travel distance.
When travel is completed, the posi-
tioning completed signal (IBC00D)
is turned ON.
When travel is completed, clear the
command (i.e., set to the NOP com-
mand) to prepare for next operation.
When IB00303 turns ON, the direc-
tion of rotation is reversed.