Yaskawa MP920 Motion Module User Manual
Page 98
2 Motion Control
2.4.5 Interpolation (INTERPOLATE, END_OF_INTERPOLATE)
2-72
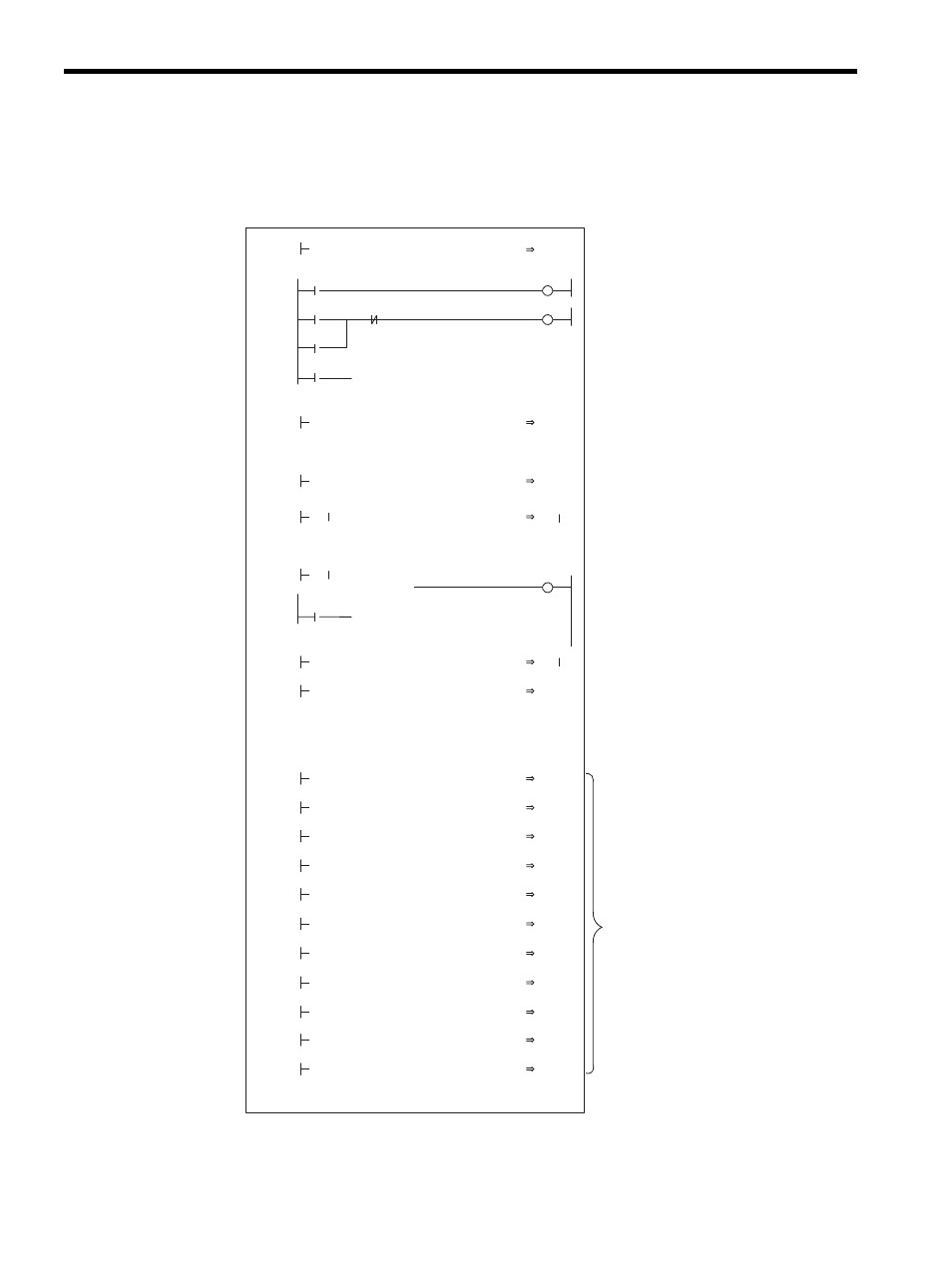
User Programming Example: Interpolation
Ladder Logic Program Example
Fig. 2.21 Programming Example for INTERPOLATE and END_OF_INTERPOLATE
The example in the above illustration has been greatly simplified. In actual operation, each
register can be controlled from the user program.
Set the position control mode to ON.
H0104
RUNMOD
OWC000
1 0000
IB00100
RUNPB
IB00304
OBC0010
1 0002
1 0004
DB000000
DB000001
DB000001
1 0005
1 0008
IFON
1 0009
00004
OWC020
2 0010
OLC012
OLC012
2 0012
++ DL00010i
2 0015
+00002
IEND
1 0018
2 0019
≥ 00022
DB000001
DB000000
DB000000
1 0022
IFON
1 0023
00000
2 0024
00005
OWC020
2 0026
IEND
1 0028
00100
DL00010
1 0029
00200
DL00012
1 0031
00300
DL00014
1 0033
00200
DL00016
1 0035
00100
DL00018
1 0037
00000
DL00020
1 0039
-00100
DL00022
1 0041
-00200
DL00024
1 0043
-00300
DL00026
1 0045
-00200
DL00028
1 0047
-00100
DL00030
1 0049
DEND
0 0051
Send RUN command to driver.
Execute INTERPOLATE command.
Set the position reference.
Check for completion of specified reference
distribution.
Execute END_OF_INTERPOLATE
command.
Increment data for position reference each
scan.