Details – Yaskawa MP920 Motion Module User Manual
Page 68
2 Motion Control
2.3.2 Position Control Without Using Motion Commands
2-42
Details
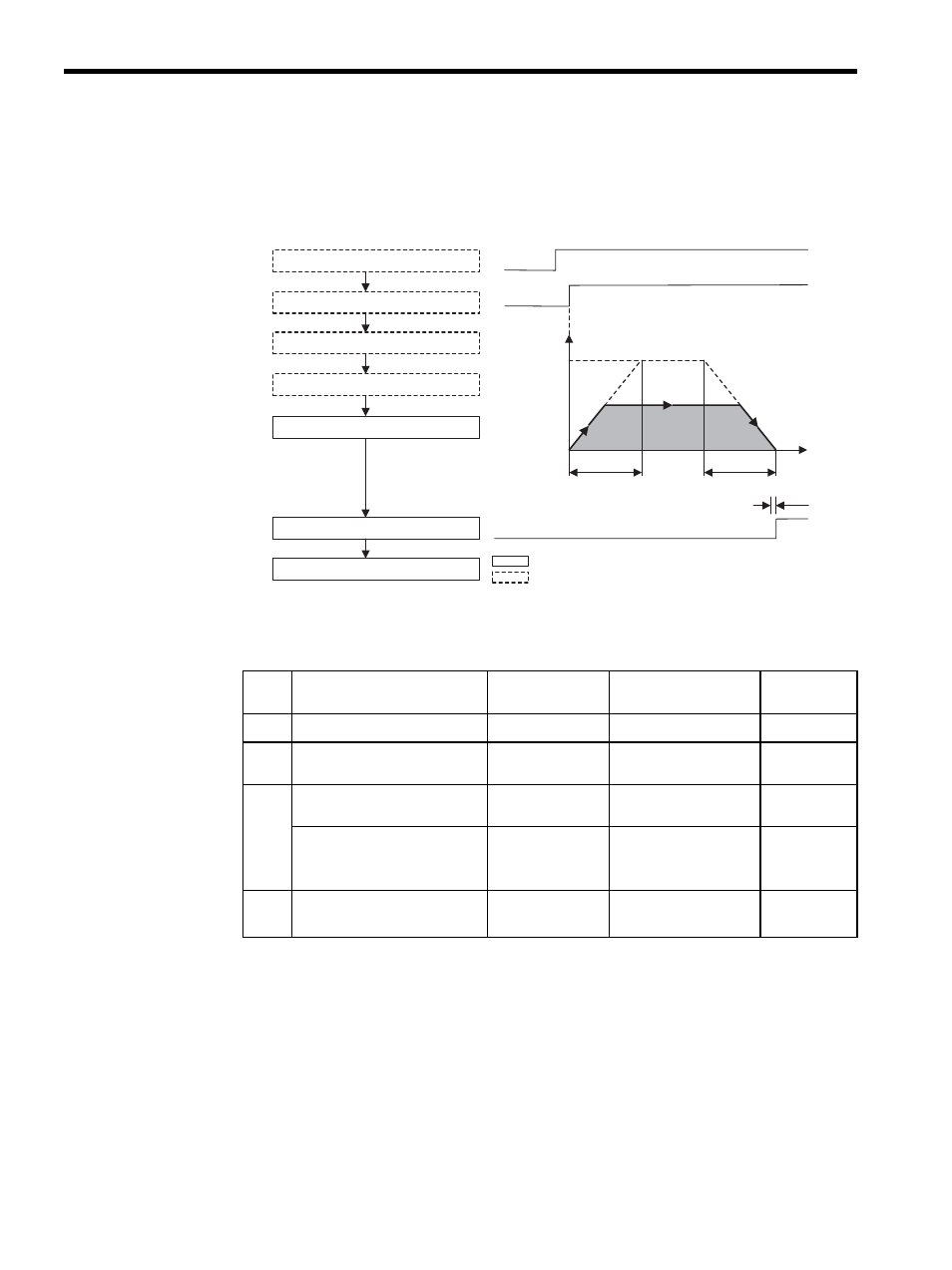
Use the following procedure to perform position control operations without using motion
commands.
1. Set the motion fixed parameters according to the user’s machine.
* 1. Valid only with an SVB-01 Module.
* 2. Valid only with an SVA-02A Module.
2. Set the motion parameters to be used in position control mode.
The following three methods can be used to set the motion setting parameters.
• Using the MPE720 Setting Parameter Window
• Using a ladder logic program
• Using a motion program
0
RUN
PCON
2. Set the motion setting parameters.
3. Set the position control mode (PCON).
4. Set the RUN command (RUN) to ON.
5. Set the position control mode to OFF.
POSCONP
1. Set the motion fixed parameters.
Positioning is started for the axis.
Servo clamp status
: System execution
: User settings
Speed
(%)
(100%)
Steady travel
speed
Position
Linear acceleration
time constant
Linear deceleration time constant
Positioning completed range
Time (t)
Table 2.19 Examples of Fixed Parameters
No.
Name
Setting Range
Meaning
Setting
Example
7
Rated Motor Speed Setting
1 to 32000
Rated motor speed
3000 min
-1
8
Number of Feedback Pulses per
Rotation
4 to 65532
Number of pulses
before multiplication
2048
9
D/A Output Voltage at 100%
Speed
0.001 to 10.000
0.001 = 0.001 V
1 = 1 V
6.000 V
Number of Feedback Pulses per
Motor Rotation
(For high-resolution)
*1
4 to 2147483647
1 = 1 pulse/rev
2048 pulses/
rev
10
D/A Output Voltage at 100%
Torque Limit
*2
0.001 to 10.000
0.001 = 0.001 V
1 = 1 V
3.000 V