Yaskawa MP920 Motion Module User Manual
Page 57
2.3 Position Control
2-31
2
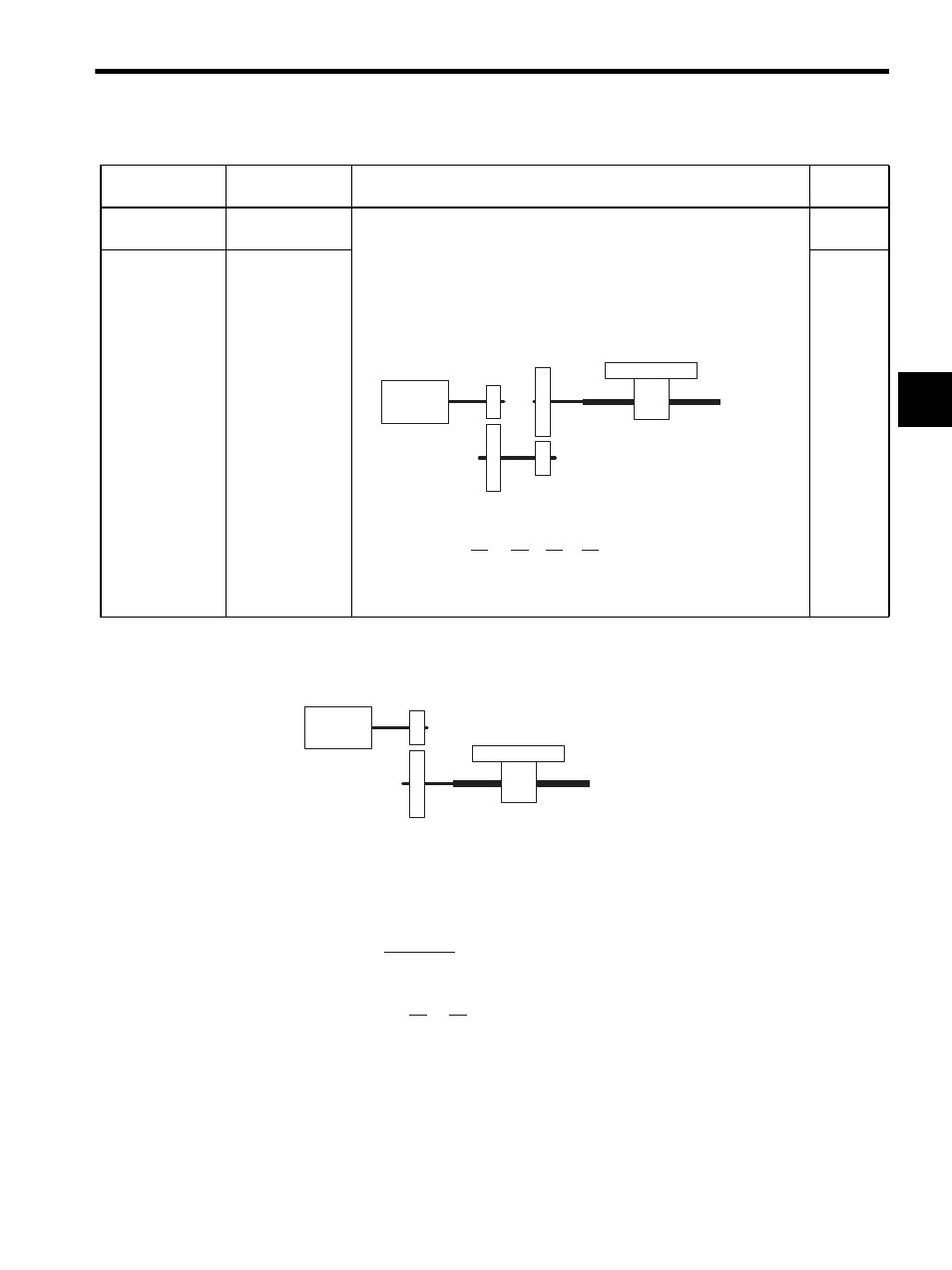
Electronic Gear Parameter Setting Example (A): With Ball Screw
In the above machine system, if the requirement is reference unit = output unit = 0.001 mm,
the setting of each parameter will be as follows:
•
•
• No.21 = 7
• No.22 = 5
No.21
Servomotor Gear
Ratio
• These parameters are used to set the gear ratio between the motor and the
load. When the motor axis has rotated m times and the mechanical config-
uration allows the load axis to rotate n times, set the following
values: No.21 = m rotations
No.22 = n rotations
• Setting range: 1 to 65,535 [rotations]
Setting Examples
1
No.22
Machine Gear
Ratio
1
Table 2.12 Electronic Gear Parameters and Constant Table (cont’d)
Servo Fixed
Parameter No.
Name
Description
Initial
Value
Motor axis
m rotations
Load axis n rotations
7 rotations
3 rotations
4 rotations
9 rotations
Gear ratio = =
×
=
Therefore, set the following values: No. 21 = 21
No. 22 = 4
n
m
3
7
4
9
4
21
Motor
m
7 rotations
Ball screw pitch
P = 6 mm/rotation
5 rotations
n
No.19 =
=
6000
6 mm
0.001 mm
Gear ratio = =
n
m
5
7