Yaskawa MP920 Motion Module User Manual
Page 72
2 Motion Control
2.4.1 Overview of Motion Commands
2-46
3
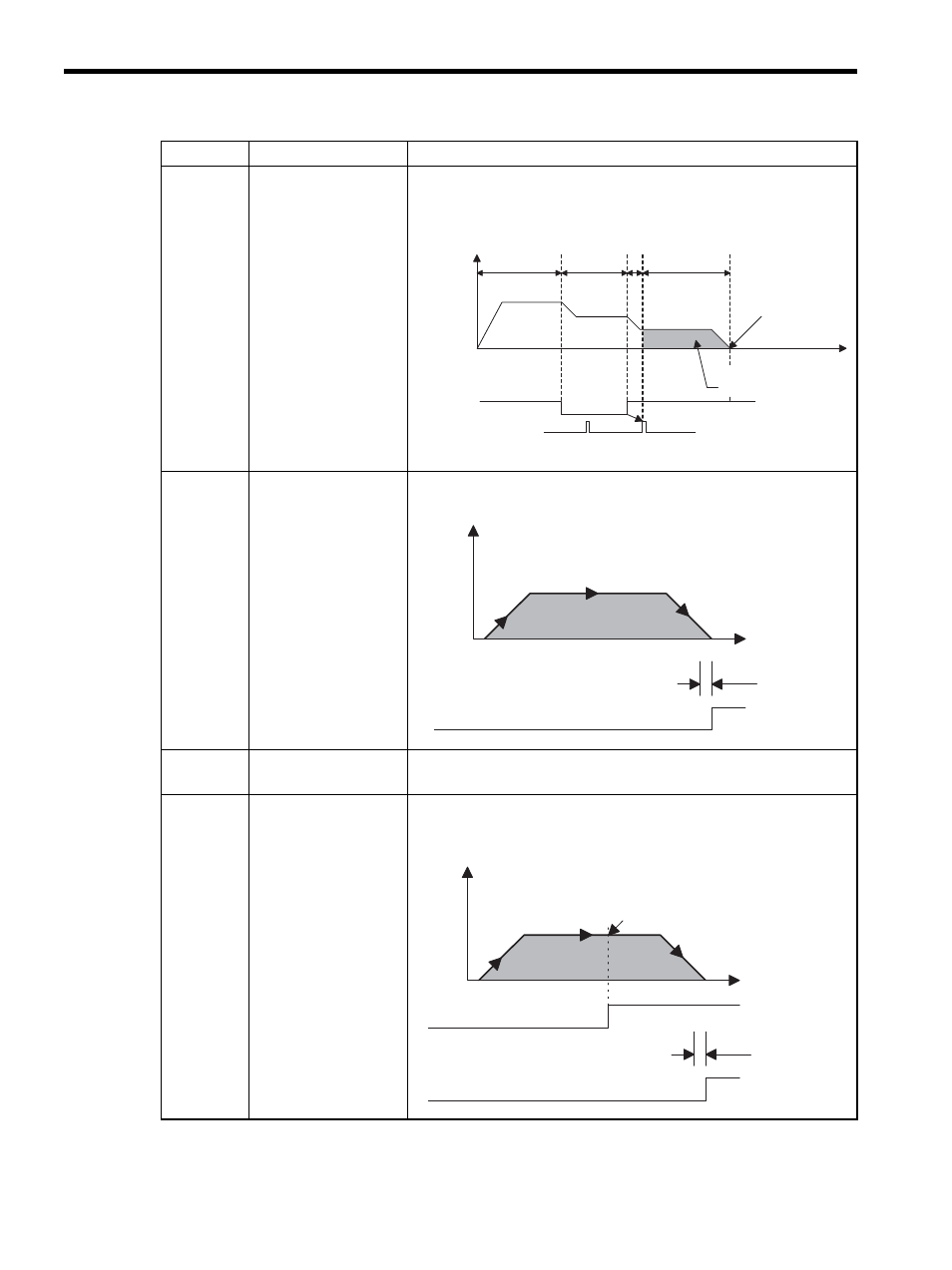
Zero Point Return
(ZRET)
Returns the system to the machine coordinate system zero point. Eight zero
return modes are provided.
4
Interpolation
(INTERPOLATE)
Performs interpolation feeding using the position data distributed from the
CPU Module.
5
Not used.
This command is used by the system.
Do not use it in a user program.
6
Interpolation with
Position Detection
(LATCH)
Latches a counter when a latch signal is input during an interpolation feed
operation, and reports the changed latch position to the reference unit sys-
tem.
Command
Name
Description
0
1.
2.
3.
4.
Reverse
direction
Forward
direction
← →
Speed
reference
Dog
(Deceleration limit switch)
Zero point signal
(Phase-C pulse)
Rapid traverse
speed
Approach
speed
Creep speed
Zero point return
position
Time
Zero
point
Zero point return final
travel distance
0
POSCOMP
Speed
(%)
Position
Positioning completed range
Time (t)
0
POSCOMP
Latch signal
Speed
(%)
Position
Positioning completed range
Reports this position.
(IL
06)
Time (t)