Yaskawa MP920 Motion Module User Manual
Page 267
6 SVB Module Specifications and Handling
6.2.2 Motion Setting Parameters
6-32
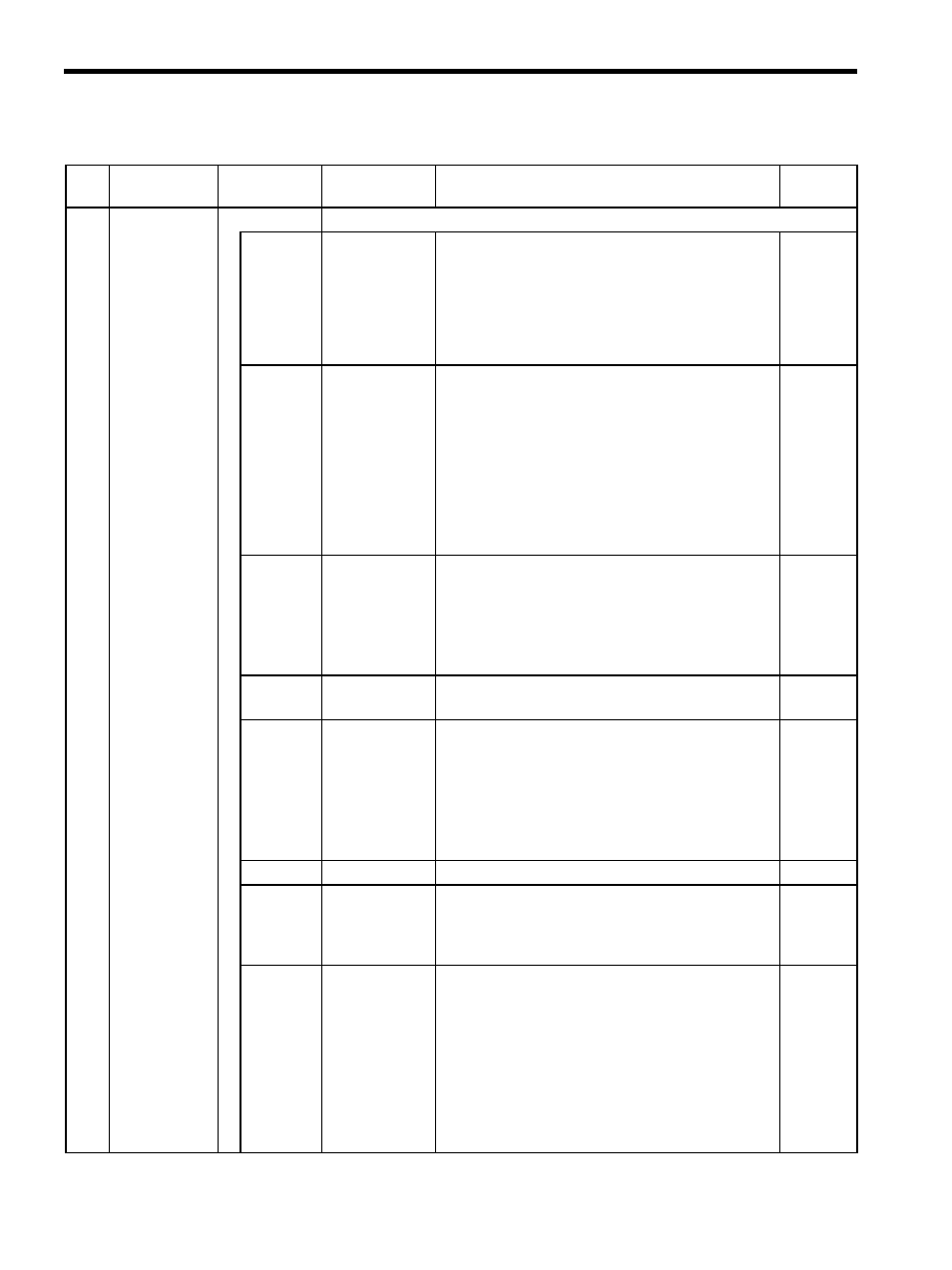
34
Motion Com-
mand Control
Flags
(MCMDCTRL)
OW21
Set motion command auxiliary functions.
Bit 0
Command Hold
(HOLD)
The machine decelerates to a stop if this bit turns ON
while an axis is moving during positioning or step execu-
tion using an OW20: Motion Command Code.
IB151: Hold Completed turns ON when the HOLD
has been completed. If this bit goes back OFF at this
point, the hold is canceled and positioning restarts.
0: OFF, 1: ON
0
Bit 1
Command Abort
(ABORT)
The machine decelerates to a stop if this bit turns ON
while an axis is moving during positioning, zero point
return, or STEP using an OW20: Motion Command
Code.
The BUSY bit (IB150) turns ON when ABORT is
being executed, and it turns OFF when the execution of
ABORT completes.
Step execution can be aborted by setting the motion com-
mand to NOP.
0: OFF, 1: ON
0
Bit 2
Direction of
Movement
(For JOG and
STEP)
(DIRECTION)
Set the movement direction.
This bit is enabled when a Motion Command Code
(OW20) is set to constant-speed feed or step opera-
tion.
0: Forward direction
1: Reverse direction
0
(Forward
direction)
Bit 3
Speed Loop P/PI
Switch (P-PI)
0: PI control
1: P control
0
(PI control)
Bits 4 to 7
Filter Type
Selection
(FILTERTYPE)
Set the type of acceleration filter.
0: No filter
1: Exponential filter
2: Average movement filter (simple S-shaped accelera-
tion and deceleration)
OW14: Filter Time Constant is valid if this parame-
ter is set to“1” or “2.”
0
(No filter)
Bits 8 to 13 Not used.
Set to“0.”
0
Bit 14
Position
Buffer Write
(BUF_W)
Data set in OL3A: Position Buffer Write Data is
stored as absolute position data in the position buffer that
is set at OL38: Position Buffer Access Number.
0: OFF, 1: ON
0
Bit 15
Position
Buffer Read
(BUF_R)
Data from the position buffer that is specified at
OL38: Position Buffer Access Number is stored as
absolute position data in the position buffer that is set at
IL28: Position Buffer Read Data. This parameter is
used to check position data that is stored in the position
buffer.
0: OFF, 1: ON
It takes two scans from the time the Position Buffer Read
command is issued until the data is stored at IL28:
Position Buffer Read Data.
0
Table 6.3 Motion Setting Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description
Factory
Setting