Positioning time over – Yaskawa MP920 Motion Module User Manual
Page 369
8.2 Alarms and Actions Taken
8-13
8
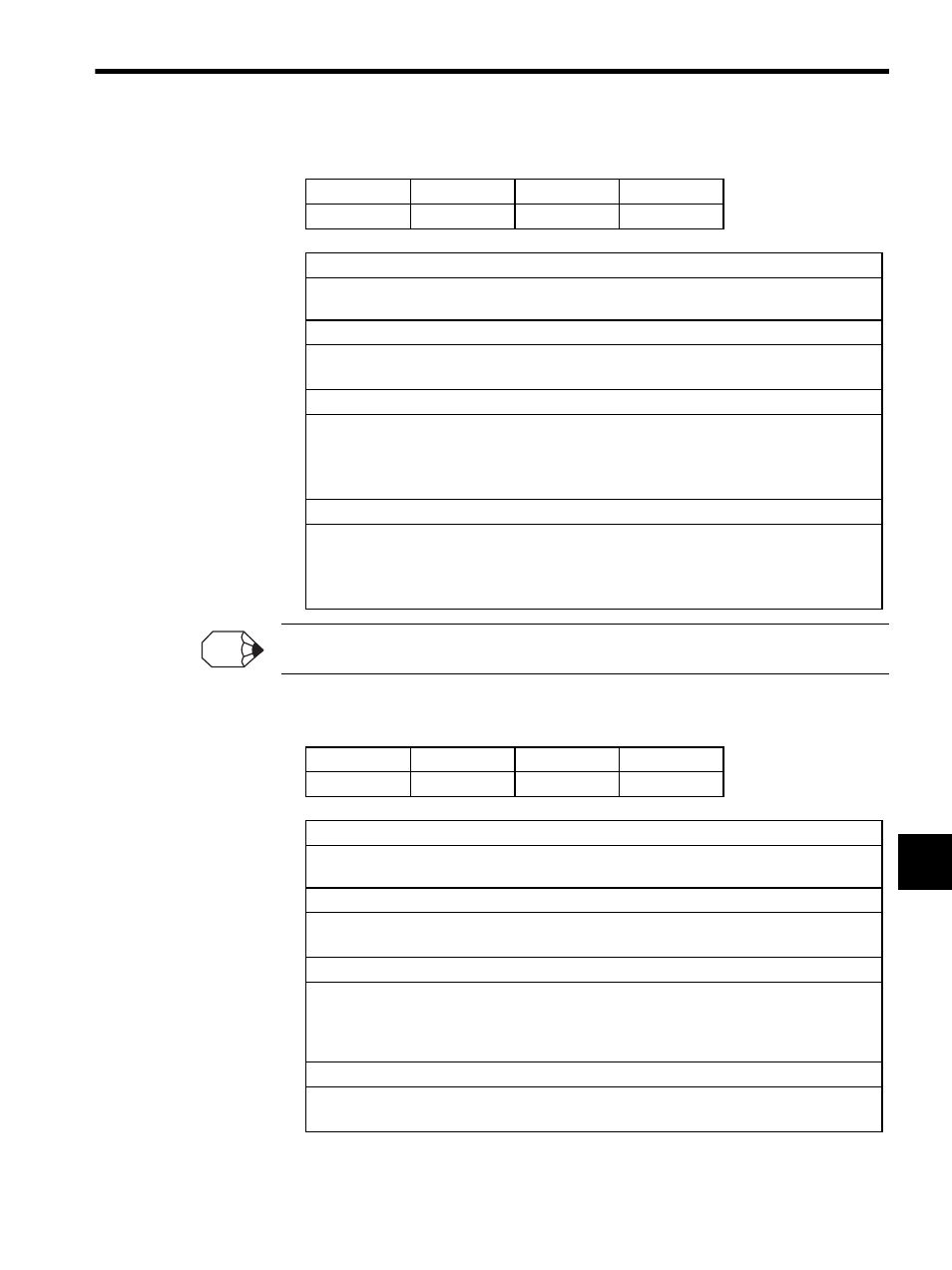
Positioning Time Over
This check will not be performed if OW34 (Positioning Complete Check Time) is set to 0.
Positioning Travel Distance Exceeded (Speed Exceeded)
SVA-01A
SVA-02A
SVB-01
PO-01
Supported
Supported
Supported
Not supported
Detection Timing
• Positioning was not completed within the time set at OW34 (Positioning Complete Check
Time) after reference distribution was completed.
Alarm Processing
• Execution of the command will be aborted.
• Bit 5 (command error end) of IW15 (Motion Command Status) will turn ON.
Errors and Causes
• Poor response because of incorrect position and speed loop gain.
• OW34 (Positioning Complete Check Time) too short.
• Insufficient Servomotor capacity for the machine load.
• Improper connection between the SERVOPACK and Servomotor.
Action Taken
• Check parameters related to SERVOPACK characteristics (all gains).
• Check the connection between the SERVOPACK and Servomotor.
• Check for sufficient Servomotor capacity.
• Check OW34 (Positioning Complete Check Time).
SVA-01A
SVA-02A
SVB-01
PO-01
Not supported
Not supported
Supported
Supported
Detection Timing
• Enabled when an electronic gear is used and is detected when the positioning command is
issued (SVB-01).
Alarm Processing
• The movement command will not be executed.
• Bit 5 (command error end) of IW15 (Motion Command Status) will turn ON.
Errors and Causes
• A move command exceeding the positioning movement limit was issued (SVB-01).
(POSITIONING, STEP, or EXTERNAL POSITIONING command)
• A speed command exceeding fixed parameter No. 38 (Maximum Pulse Output Frequency) was
issued (PO-01).
Action Taken
• Check the amount of move specified for the axis that is being positioned (SVB-01).
• Check the speed specified for the axis that is being positioned (PO-01).
INFO