User program example example of run operation, Operating conditions, Ladder logic program example – Yaskawa MP920 Motion Module User Manual
Page 70
2 Motion Control
2.3.2 Position Control Without Using Motion Commands
2-44
User Program Example
Example of RUN Operation
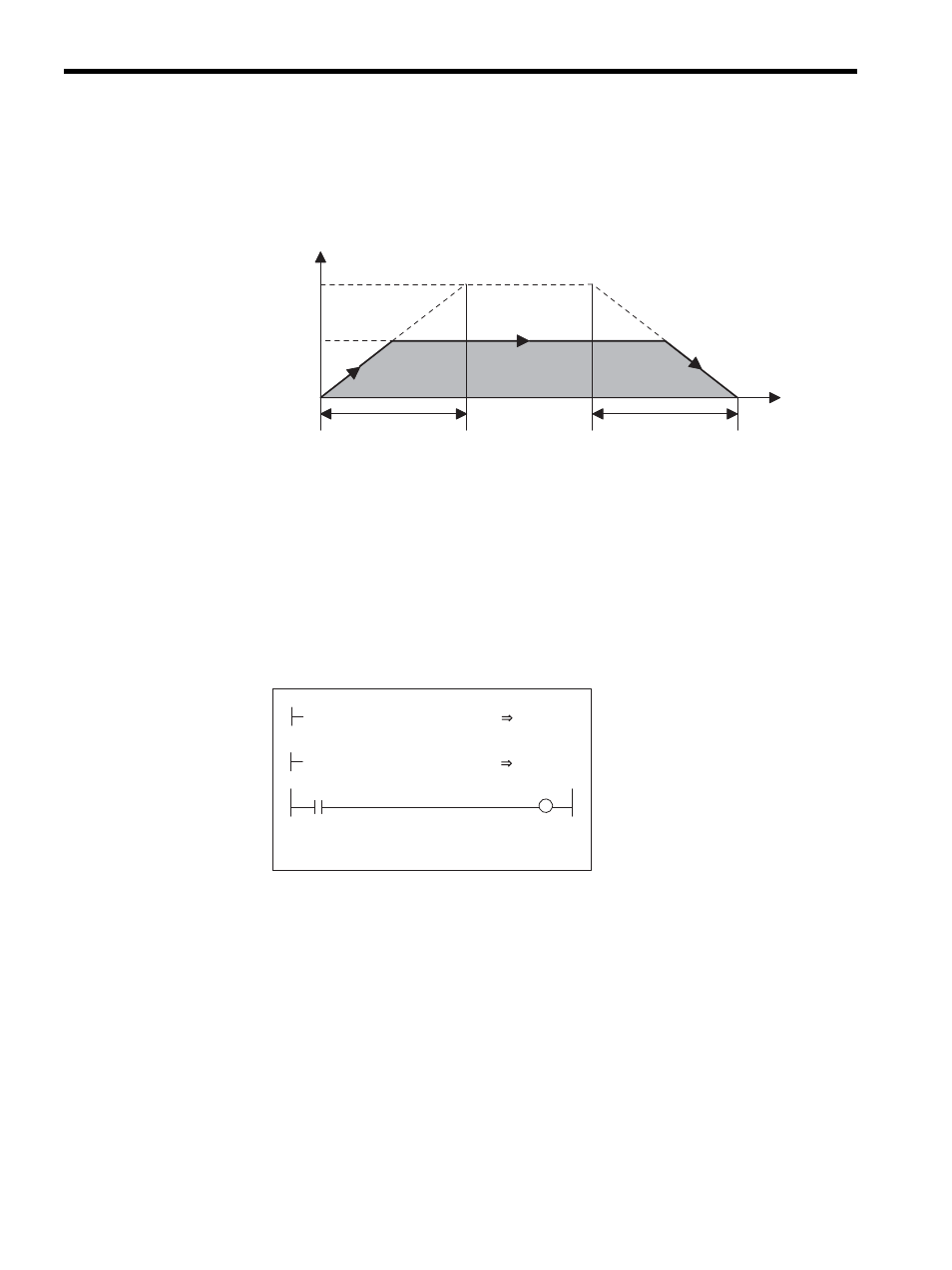
Fig. 2.13 Position Pattern
Operating Conditions
In the pattern shown in the above illustration, the axis is stopped at an absolute position of
10000 (pulses).
• Position reference: XREF = 10000 (pulses)
Ladder Logic Program Example
Fig. 2.14 RUN Commands (DWG H03)
The example in the above illustration has been greatly simplified. In actual operation, each
register can be controlled from the user program.
NREF
0
NACC
NDEC
Time (t)
Steady travel speed
reference
Position reference
Speed
(%)
NR
(100%)
DEND
RUN
OBC0810
RUNPB
IB00304
0000010000
XREF
OLC092
H0004
RUNMOD
OWC080
Set the position control mode to ON.
Position reference pulse (XREF)
(Absolute position: 10000)
Driver RUN command (RUN)
When IB00304 turns ON, position control
starts, and the axis is moved to absolute
position 10000. When absolute position
10000 is reached, the IBC080D positioning
completed signal turns ON.