2 positioning (posing), Overview, Details – Yaskawa MP920 Motion Module User Manual
Page 74
2 Motion Control
2.4.2 Positioning (POSING)
2-48
2.4.2
Positioning (POSING)
Overview
Positions the axis at the position reference position using the specified acceleration/deceler-
ation time constant and the specified rapid traverse speed.
The rapid traverse speed and the position reference value can be changed during operations.
When the change in the position reference value is less than the deceleration distance or the
reverse direction is used, the system first decelerates to a stop and then is repositioned
according to the position reference value.
Details
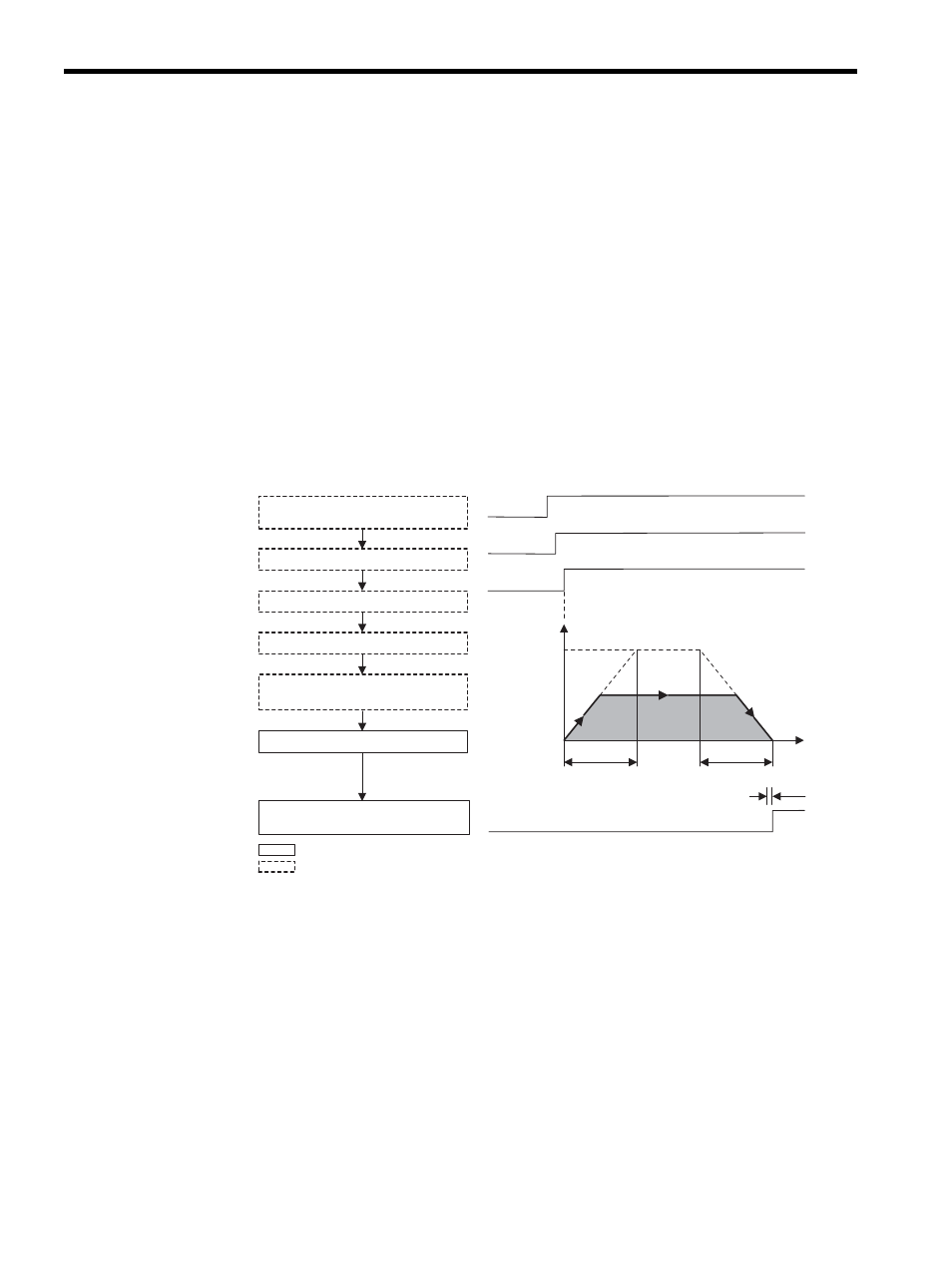
Use the following procedure to perform positioning operations.
1. Set the initial values for the motion fixed parameters and the motion setting parameters
according to the user’s machine.
When performing position control using motion commands, be sure to set the following
parameters:
• Set “Use (= 1)” in bit 7 (motion command code selection) of motion fixed parameter
No. 14 (Additional Function Selections).
• Set “1 (= Enabled)” in bit 8 (motion command code enable/disable) in the RUN
Mode Settings (OW00) motion setting parameter.
2. Set the Position Control Mode (PCON) (bit 2 of OW00).
3. Set the motion setting parameters to be used in positioning (POSING).
0
RUN
Motion command
(POSING)
PCON
1. Set the motion fixed parameters.
Set the motion setting parameter initial values.
2. Set the position control mode (PCON).
3. Set the motion setting parameters.
4. Set Servo ON (RUN) to ON.
: System execution
5. Execute the positioning (POSING)
motion command.
POSCONP
: User settings
Positioning started for the axis.
Positioning completed signal (POSCOMP)
turned ON.
Speed
(%)
(100%)
Time (t)
Rated speed
Linear acceleration time constant
Linear deceleration time constant
Positioning completed range
Rapid
traverse
speed
Position