Yaskawa MP920 Motion Module User Manual
Page 277
6 SVB Module Specifications and Handling
6.2.3 Motion Monitoring Parameters
6-42
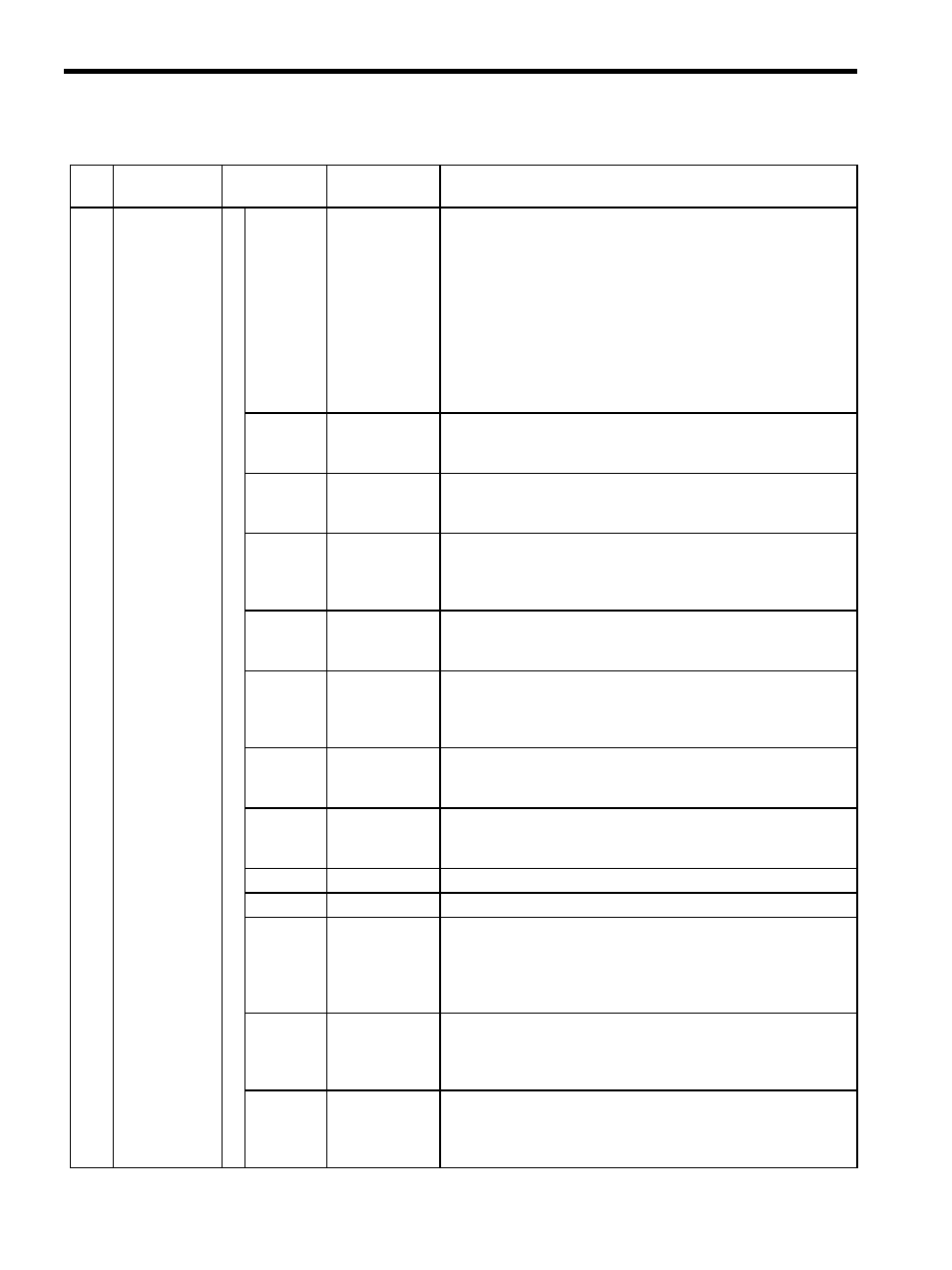
35
Alarm
(ALARM)
(cont’d)
Bit 4
Negative
Software Limit
(SOTR)
Valid if IB156: Zero Point Return Completed turns ON when the
negative software limit is enabled and an infinite length axis is
selected.
OW20: Motion Command Code Interpolation
This bit turns ON when IL18: Reference Position in Machine
Coordinate System + OL26: Stopping Distance
≤ Negative
Software Limit (motion fixed parameter No. 29).
OW20: Motion Command Codes Positioning, Feed, or Step
This bit turns ON when IL18: Reference Position in Machine
Coordinate System
≤ Negative Software Limit (motion fixed
parameter No. 29).
Bit 5
Servo OFF
(SVOFF)
Turns ON if Motion Command Code (OW20) is set to a move-
ment command such as Positioning or Step when the servo is OFF
(OB010 is set to OFF).
Bit 6
Positioning
Time Over
(TIMEOVER)
Turns ON if positioning is not completed within the time specified in
OW34 (Positioning Completed Check Time) after command dis-
tribution is completed.
Bit 7
Positioning
Travel Distance
Over
(DISTOVER)
Turns ON when a move command exceeding the maximum position-
ing travel distance was executed.
Bit 8
Filter Type
Change Error
(FIRTYPERR)
Turns ON if the filter type is changed before command distribution is
completed.
Bit 9
Filter Time
Constant Change
Error
(FILTIMERR)
Turns ON if the filter time constant is changed before command distri-
bution is completed.
Bit 10
Control Mode
Error
(MODERR)
Turns ON when a move command is set at OW20: Motion Com-
mand Code in a mode other than Position Control Mode (OB002
is OFF).
Bit 11
Zero Point Not
Set
(ZSET_NRDT)
Turns ON if a movement command is executed before the zero point
is set.
Bit 12
Not used.
−
Bit 13
Not used.
−
Bit 14
Servo Driver
Synchronous
Communica-
tions Error
(WDT_NRDY)
Turns ON when a MECHATROLINK servo synchronous communica-
tions error is detected.
Bit 15
Servo Driver
Communica-
tions Error
(COM_ERR)
Turns ON when two consecutive MECHATROLINK servo communi-
cations errors are detected.
Bit 16
Servo Driver
Command
Timeout Error
(SVTIMOUT)
Turns ON if a MECHATROLINK servo command is not completed
within the specified time.
Table 6.4 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description