Yaskawa MP920 Motion Module User Manual
Page 220
5 SVA Module Specifications and Handling
5.4.2 Motion Setting Parameters
5-78
43
Zero Point Re-
turn Final
Travel
Distance
(ZRNDIST)
OL2A
-2
31
to 2
31
-1
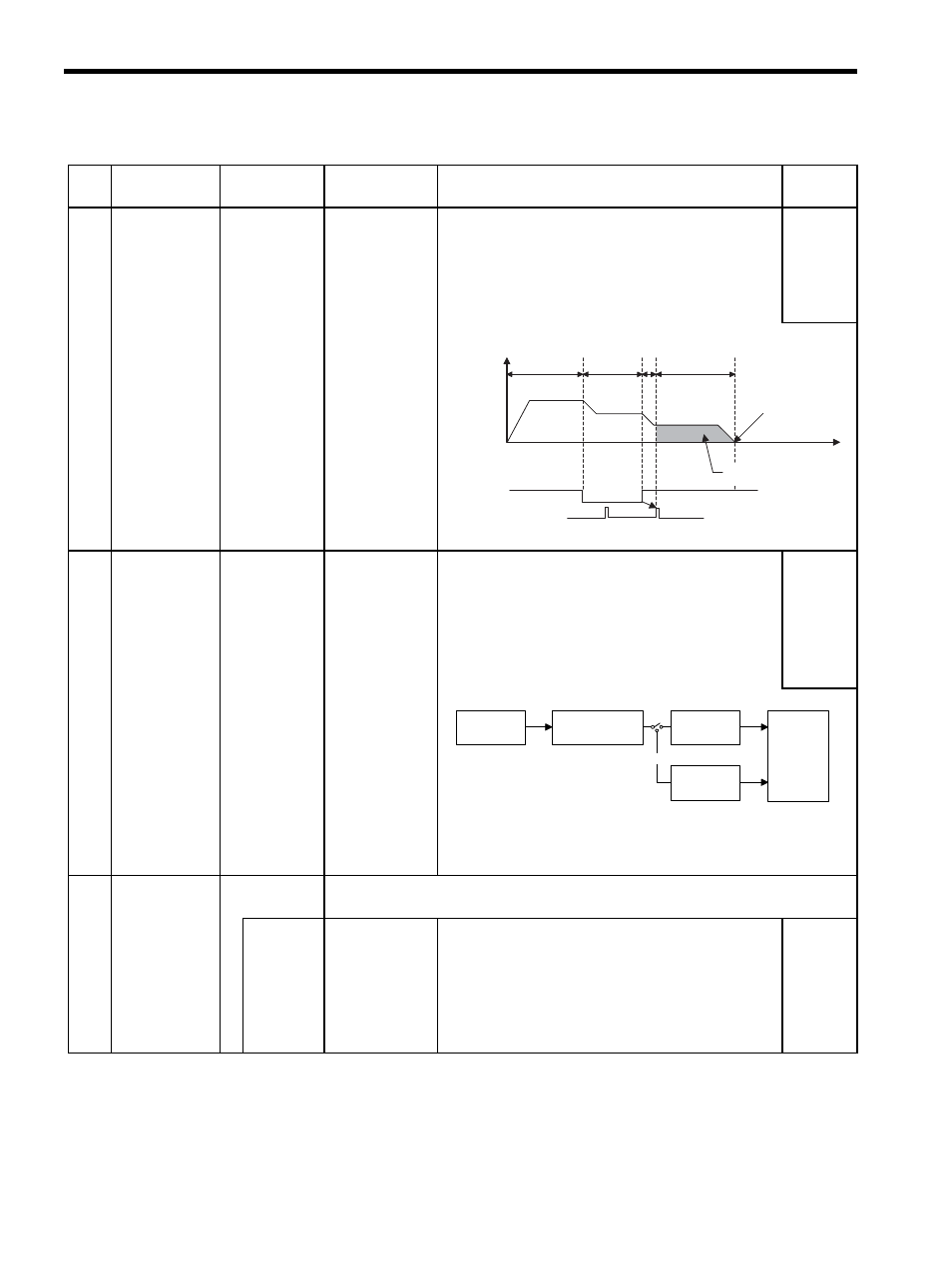
The machine is moved the distance set for this parameter
after a valid zero point pulse is detected and then stops
when returning to the zero point using an OW20:
Motion Command Code. The final point is set as the zero
point of the coordinate system.
• Unit: Reference unit
0
45
Override (OV)
OW2C
0 to 32767
Set the override for the output speed as a percentage of
the OL22: Rapid Traverse Speed in 0.01% units.
For interpolation related commands, set override in the
register specified in the Group Definition Window.
Rapid Traverse Speed Output:
Rapid Traverse Speed
× Override = Output speed
(OL22) (OW2C)
100.00
This parameter is valid when fixed parameter number 17: Override
Selection (bit 9 of Motion Controller Function Selection Flags) is set
to Enabled.
46
Position Con-
trol Flags
(POSCTRL)
OW2D
Set the functions related to position data managed by Motion Modules. The bit configura-
tion is described below.
Bit 0
Machine Lock
Mode Setting
(MLK)
Used when an OW20: Motion Command Code is
used in Position Control Mode.
In Machine Lock mode, only the Machine Coordinate
System Calculation Position (CPOS) (IL02) is
updated without actually moving the axis.
A change in this bit will be effective when IB152:
(Distribution Completed) turns ON.
0
Table 5.6 Motion Setting Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description
Factory
Setting
0
1.
2.
3.
4.
Reverse direction
←→ Forward direction
Speed
reference
Dog
(Deceleration LS)
Zero point signal
(Phase-C pulse)
Rapid traverse
speed
Approach
speed
Creep speed
Zero point return
position
Zero point
Zero point return final
travel distance
Time
Rapid Traverse
speed
(OL
22)
Fixed parameter
b9: Override
Selection
Override
(OW
2C)
Enabled
Output
speed
100%
Disabled