Error counter clear input – Yaskawa Sigma II Series Servo System User Manual
Page 107
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 21
Error Counter Clear Input
The procedure for clearing the error counter is described below.
The following occur when the CLR signal is set to high level.
•
The error counter inside the servo amplifier is set to 0.
•
Position loop control is prohibited.
Use this signal to clear the error counter from the host controller or select the
following clear operation through parameter Pn200.1.
Select the pulse form for the error counter clear signal CLR (CN1-15).
Input CLR CN1-15
Clear Input
Position Control
Input /CLR CN1-14
Clear Input
Position Control
Parameter
Signal
Setting Range
Control Mode
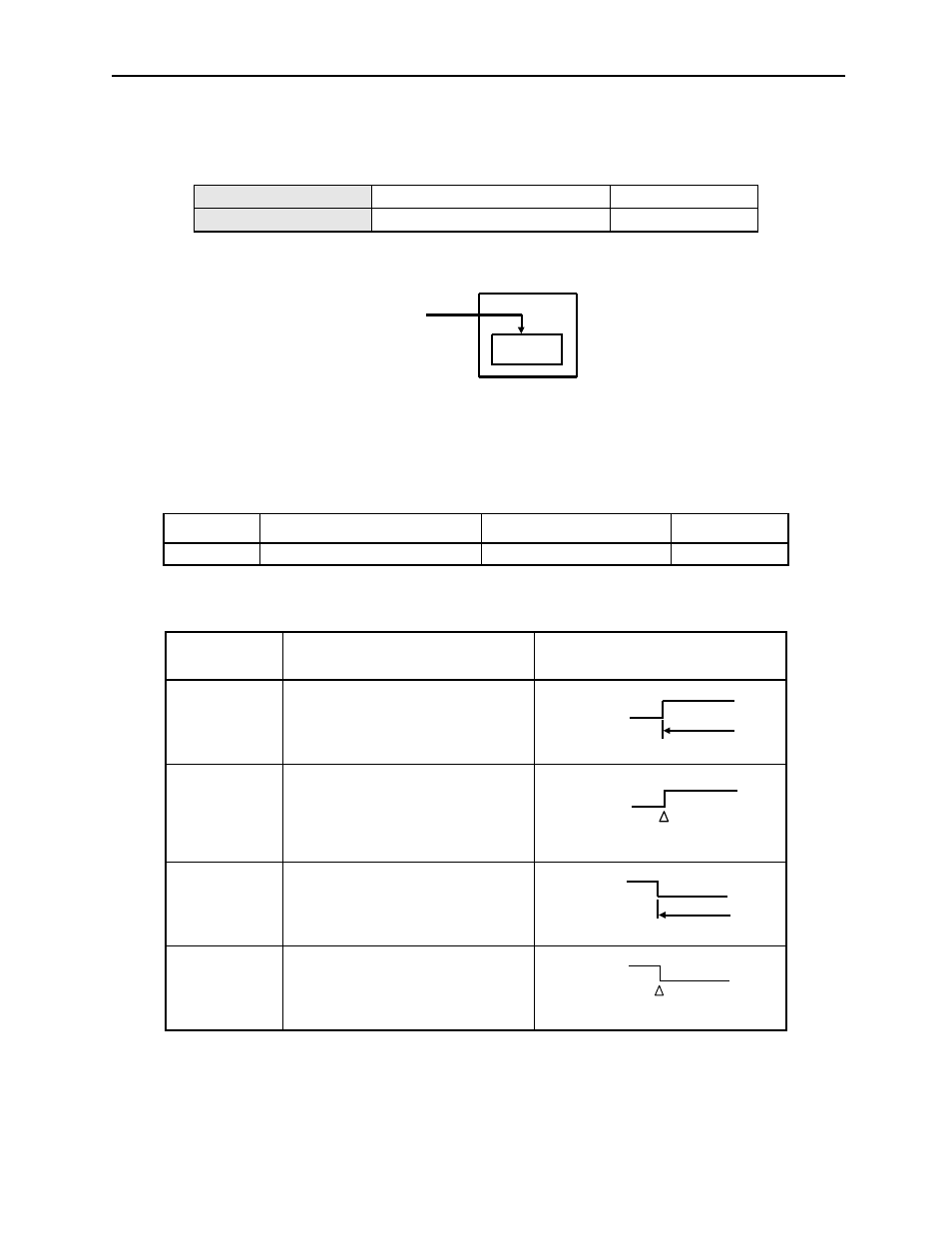
Pn200.1
Error Counter Clear Signal Form
Default Setting: 0
Position Control
Pn200.1
Setting
Description Clear
Timing
0
Clears the error counter when the
CLR signal goes high.
Error pulses do not accumulate as
long as the signal remains high.
1
Clears the error counter on the rising
edge of the CLR signal.
Clears the error counter only once on
the rising edge of the CLR signal.
2
Clears the error counter when the
CLR signal goes low.
Error pulses do not accumulate as
long as the signal remains low.
3
Clears the error counter on the falling
edge of the CLR signal.
Clears the error counter only once on
the falling edge of the CLR signal.
Servo Amplifier
CLR
Clear
Position loop
error counter
CLR
(CN1-15)
High
Cleared state
CLR
(CN1-15)
High
Cleared only once at this point
CLR
(CN1-15)
Low
Cleared state
CLR
(CN1-15)
Low
Cleared only once at this point