10 torque limiting by analog voltage reference, Torque limiting by analog voltage reference -47, Using torque limiting by – Yaskawa Sigma II Series Servo System User Manual
Page 133: Analog voltage reference
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 47
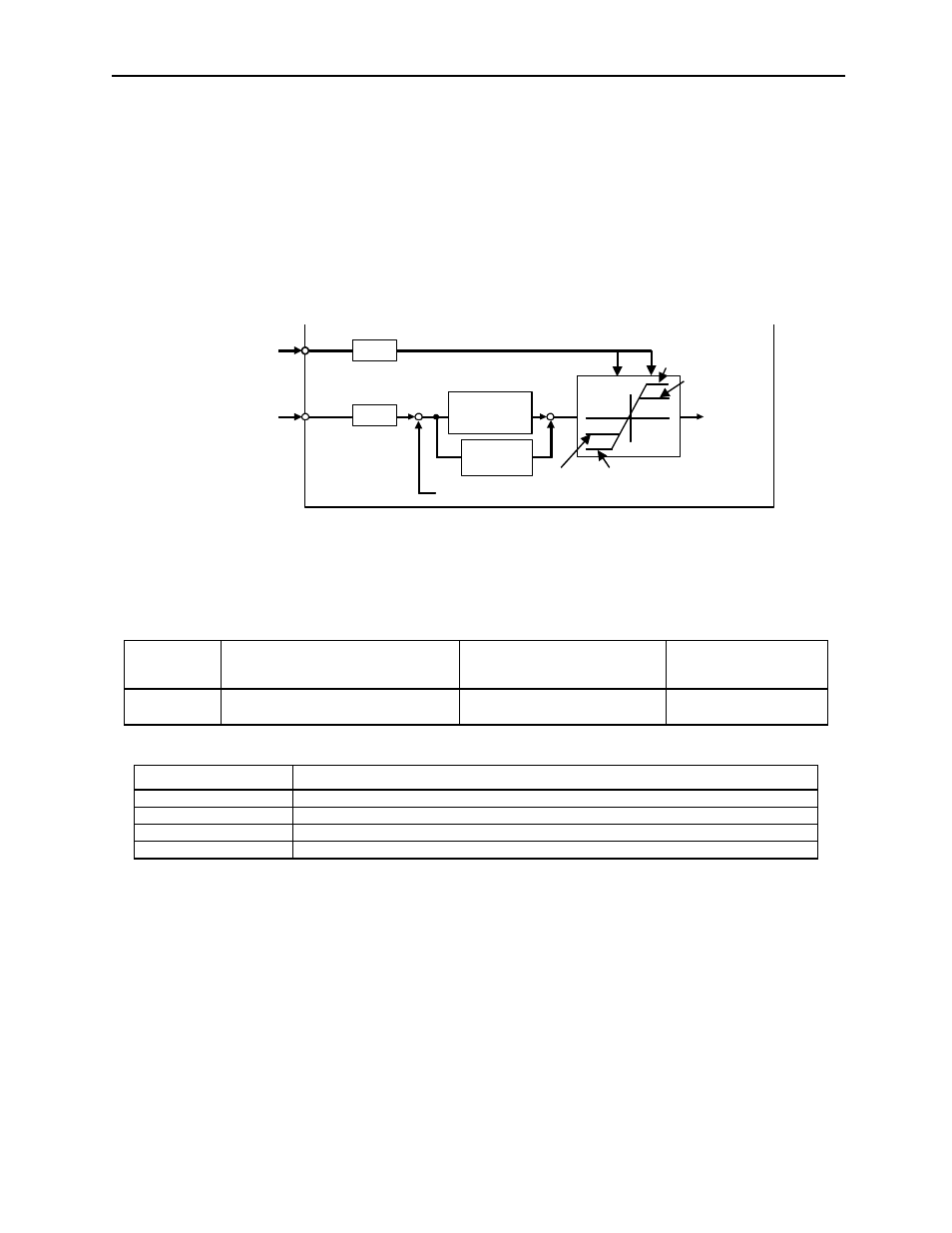
5.2.10 Torque Limiting by Analog Voltage Reference
Torque limiting by analog voltage reference limits torque by assigning a torque
analog voltage to the T-REF terminal (CN1-9 and 10). It cannot be used for torque
control because the torque reference input terminal T-REF is used as an input
terminal.
Torque is limited at the forward run side when the P-CL signal turns ON; and is
limited at the reverse run side when the N-CL signal turns ON.
Using Torque Limiting by
Analog Voltage Reference
To use this function, set the following parameter to 3:
This parameter can be used to enable torque limiting by analog voltage reference.
This function cannot be used with the torque feed-forward function described in
5.2.8 Torque Feed-Forward Function.
To use this function, verify how input signals have been allocated. (Refer to Section
5.3.3 Input Circuit Signal Allocation). The following table outlines factory default
Parameter
Signal
Setting
(rpm)
Control Mode
Pn002.0
Speed Control Option
(T-REF Terminal Allocation)
Default Setting: 0
Speed Control
Position Control
Pn002.0 Setting
T-REF Function
0
None.
1
T-REF terminal used for external torque limit input.
2
T-REF terminal used for torque feed-forward input.
3
T-REF terminal used for external torque limit input when P-CL and N-CL are valid.
Pn300
Integration
(Pn101)
Speed loop
gain
(Pn100)
+
+
+
-
Speed feedback
Pn400
Torque limit value
Speed reference
T-REF
V-REF
Torque
reference
Pn403
Torque limit
Pn404
(/P-CL: ON)
Pn402
Pn405
(/N-CL: ON)
(/P-CL: ON)
(/N-CL: ON)