5 using the running output signal (/tgon), 5 using the running output signal (/tgon) - 77, Using the running output signal (/tgon) -77 – Yaskawa Sigma II Series Servo System User Manual
Page 163
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5-77
The following parameter is used to set conditions for speed coincidence output.
This parameter is used to set conditions for speed coincidence signal /TGON output.
The /V-CMP signal is output when the difference between the speed reference and
actual motor speed is below this setting.
Example:The /V-CMP signal turns ON at 1900 to 2100rpm if the parameter is set to 100 and the reference
speed is 2000rpm.
Note: /V-CMP is a speed control signal. With the default setting, this signal is used as the positioning
completed signal /COIN for position control, and it is always ON for torque control
.
5.5.5
Using the Running Output Signal (/TGON)
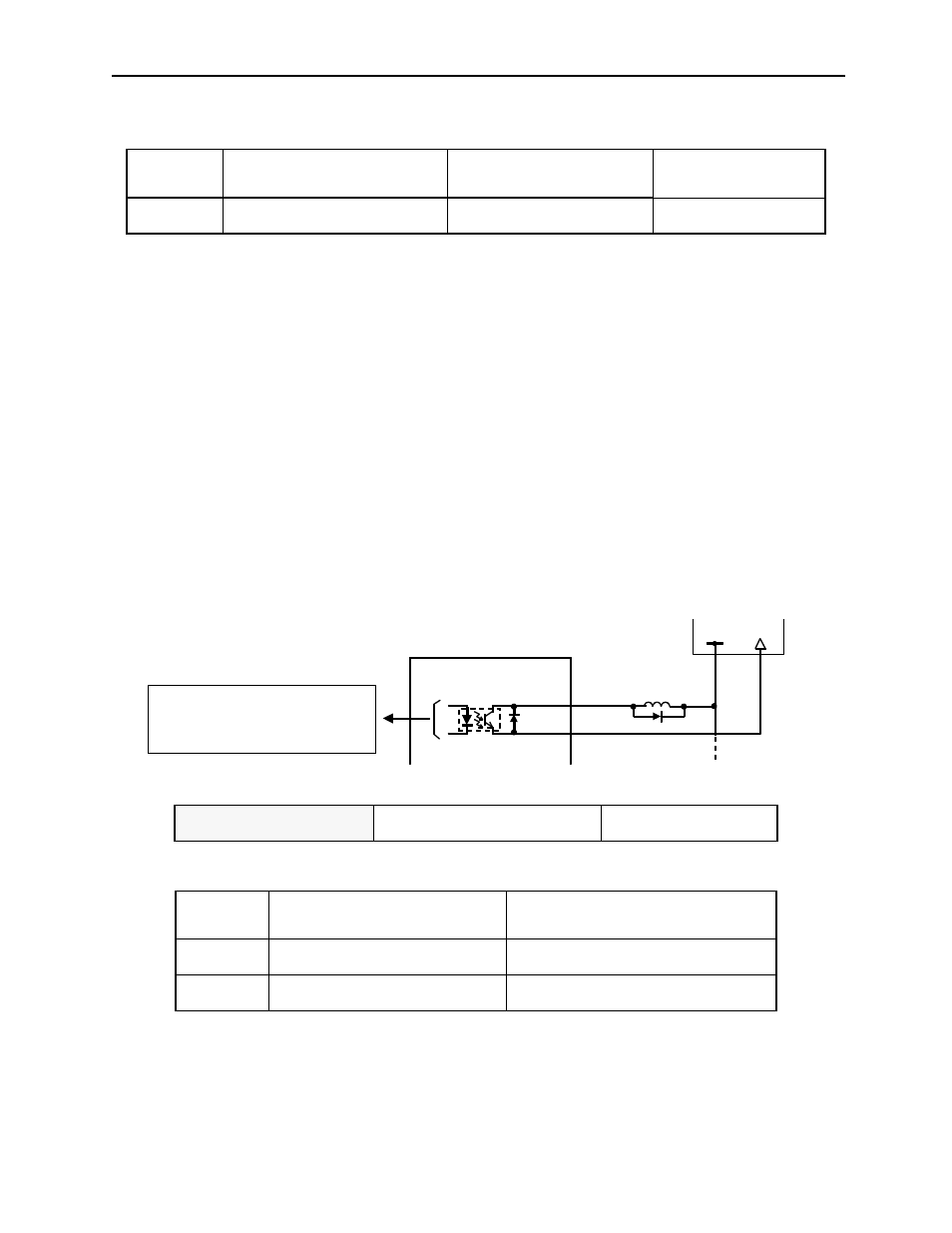
The basic use and wiring procedures for the running (/TGON) output signal
(photocoupler output signal) are described below. The signal can be activated to
indicate that the servomotor is currently operating. It is used as an external
interlock.
Parameter
Signal
Setting
(rpm)
Description
Pn503
Speed Coincidence Signal
Output Width
Setting Range: 0 to 100
Default Setting: 10
Speed Control
Output /TGON CN1-27
Running Output Signal
Speed/Torque Control,
Position Control
/TGON
State
Status
Result
ON
Closed or low level.
Servomotor is operating. (Motor speed
is above the setting level).
OFF
Open or high level.
Servomotor is not operating. (Motor
speed is below the setting level).
+24V
0V
Servo amplifier
I/O power supply
CN1-27 /TGON+
CN1-28 /TGON-
Photocoupler output levels per output node:
• Maximum operating voltage: 30V
DC
• Maximum output current: 50mA
DC