Yaskawa Sigma II Series Servo System User Manual
Page 78
Sigma II User’s Manual
Chapter 4: Trial Operation
4 - 6
Note: The servomotor will not operate properly if the following signal lines are not wired correctly. Always
wire them correctly. Short the signal lines if they will be unused. The input signal selections
(parameters Pn50A to Pn50D) can be used to eliminate the need for external short circuiting.
Note: IF an absolute encoder is being used, the servo will not turn ON when the servo ON signal (/S-ON) is
input unless the SEN signal is also ON.
When the SEN signal is checked in monitor mode, the top of the LED will light because the SEN
signal is high when ON.
7. Turn ON the servo.
Turn ON the servo using the following procedure.
a. Make sure there are no reference signals input.
•
Set V-REF (CN1-5) and T-REF (CN1-9) to 0V for speed and torque
control.
•
Set PULS (CN1-7) and SIGN (CN1-11) to low for position control.
Input Signal Status
LED Display
OFF (high level)
Top LED indicators light.
ON (low level)
Bottom LED indicators light.
Signal
Symbol
Connector Pin
Number
Description
P-OT
CN1-42
The servomotor can rotate in the forward
direction when this signal line is low (0V).
N-OT
CN1-43
The servomotor can rotate in the reverse
direction when this signal line is low (0V).
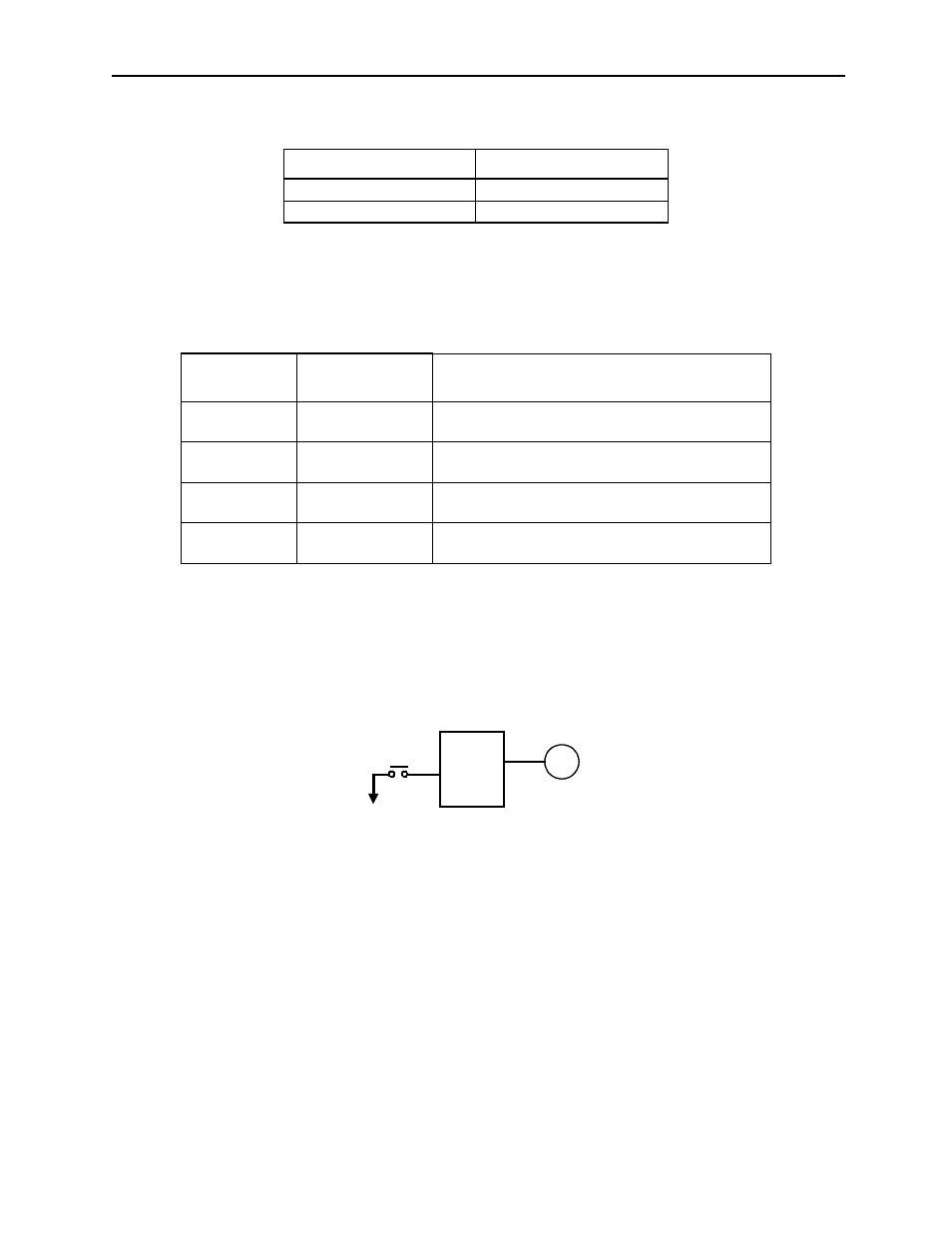
/S-ON
CN1-40
The servomotor is turned ON when this signal
line is low (0V). Leave the servomotor OFF.
+24VIN
CN1-47
Control power supply terminal for sequence
signals.
Servo amplifier
Servomotor
Turns ON the servo.
0V
/S-ON
CN1-40