7 speed feedback compensation, 7 speed feedback compensation - 22, Speed feedback compensation -22 – Yaskawa Sigma II Series Servo System User Manual
Page 254: Adjustment procedure, Differ, nevertheless
Sigma II User’s Manual
Chapter 6: Servo Adjustment
6 - 22
6.2.7
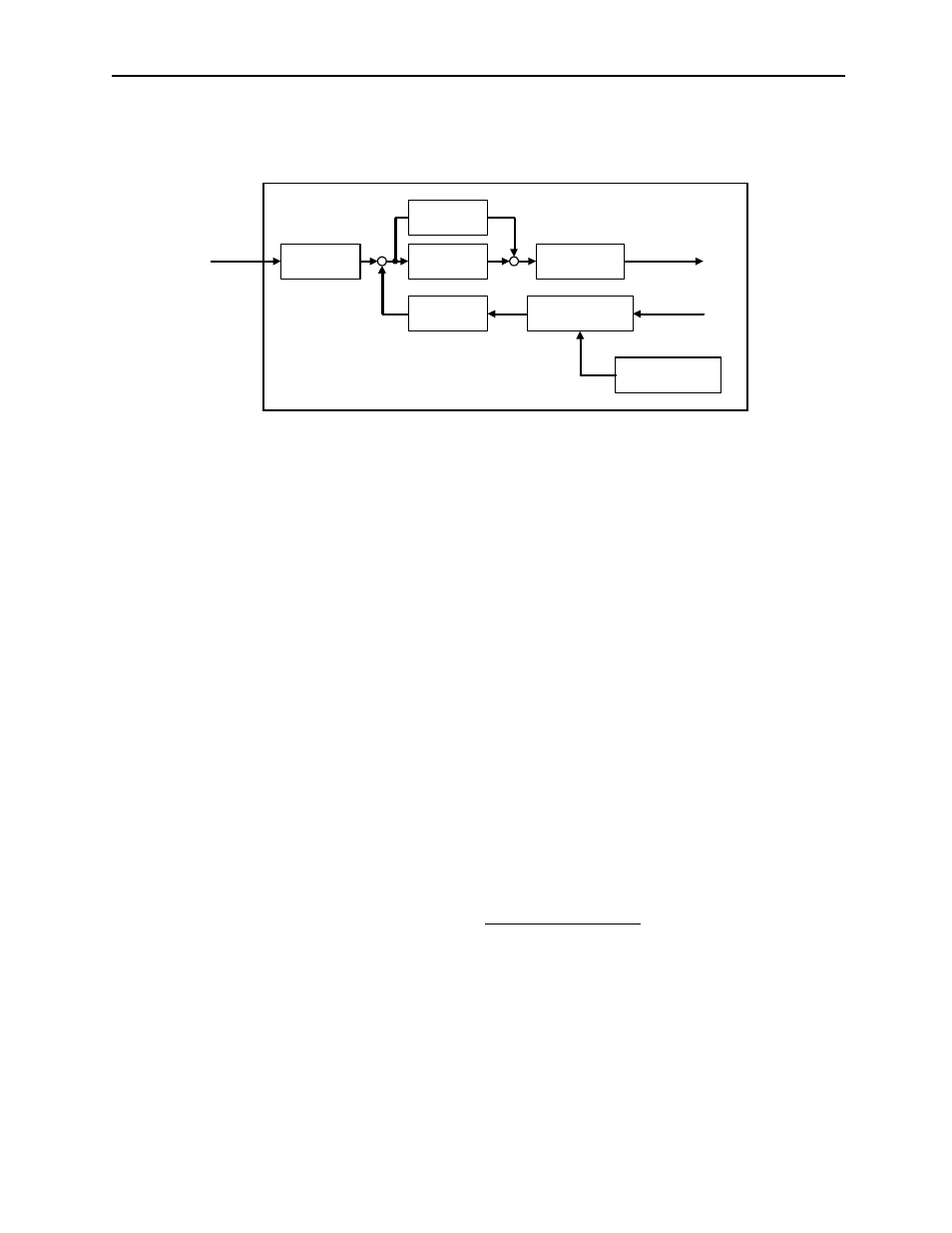
Speed Feedback Compensation
Use this function to shorten the system’s setting time in positioning operation.
Note: This function is available provided that the inertia ratio set in Pn103 is correct. Therefore, perform
online auto-tuning to obtain and save the results as the parameters. Refer to 6.3 Auto-Tuning for
details. Otherwise, directly set the inertia ratio.
Adjustment Procedure
When adding the value of speed feedback compensation, be sure to follow the
procedure described below and make servo gain adjustments while watching the
analog monitor to observe the position error and torque reference. Refer to 6.5
Analog Monitor
for details.
1.
Set parameter Pn110 to “0002” so that the online auto-tuning function will be
disabled. Refer to 6.3.4 Parameters Related to Online Auto-Tuning and Appen-
dix B List of Parameters
for details regarding Pn110.
2.
First, make normal servo gain adjustments with no feedback compensation. In
this case, gradually increase the speed loop gain in Pn100 while reducing the
speed loop integral time constant Pn101, and finally set the speed loop gain in
Pn100 to the same value as that of the position loop gain in Pn102
.
The relationship between the speed loop gain and integral time constant is as
follows:
Take the value obtained from the following formula as a reference value for setting
the speed loop integral time constant in Pn101.
Unit of speed loop gain: [Hz]
Check the unit when setting the speed loop integral time constant in Pn101. Pn101
is set in 0.01ms increments.
The units for speed loop gain (Hz) and position loop gain (s
-1
) differ, nevertheless,
Error counter
output
Position loop gain
(Pn102)
Integral control
(Pn101)
Speed loop gain
(Pn100)
Speed feedback
filter (Pn308)
Torque reference
filter (Pn401)
Torque reference
Speed feedback
Speed feedback com
pensation (Pn111)
Speed feedback com
pensation function
selection (Pn110.1)
+
-
+
+
Speed loop integral time constant = (s)
4
2
π x Speed loop gain