Before reading this chapter, Parameter configurations – Yaskawa Sigma II Series Servo System User Manual
Page 90
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 4
Before Reading this Chapter
This chapter describes the use of each CN1 connector I/O signals in the SGDH servo
amplifier as well as the procedure for setting the related parameters for the intended
purposes.
The following sections can be used as references for this chapter.
•
List of CN1 I/O signals: See 3.4.3 I/O Signal Names and Functions.
•
CN1 I/O signal terminal layout: See 3.4.2 List of CN1 Terminals.
•
List of parameters: See Appendix B List of Parameters.
•
Parameter setting procedure: See 7.1.6 Operation in Parameter Setting Mode
The CN1 connector is used to exchange signals with the host controller and external
circuits.
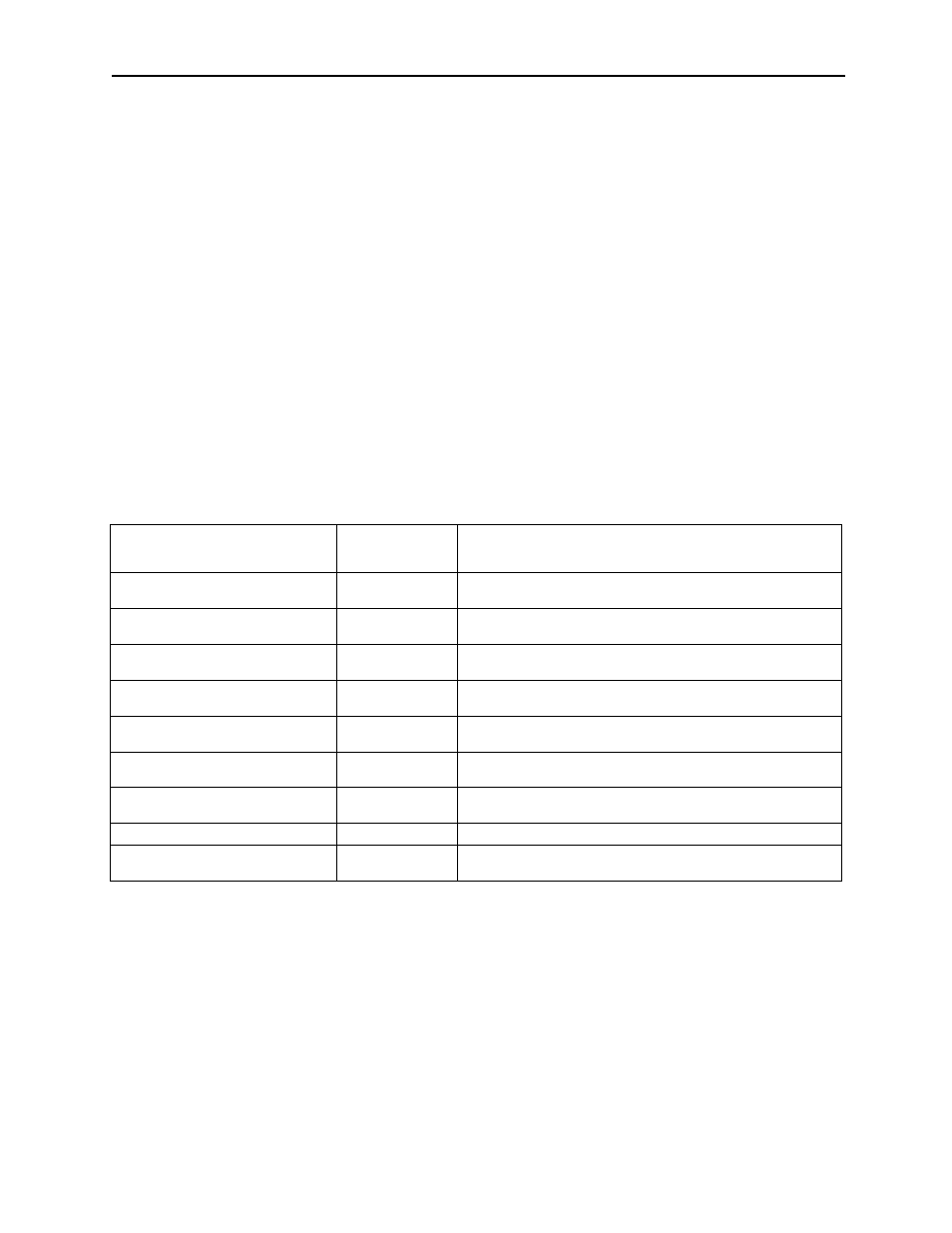
Parameter Configurations
Parameters are comprised of the types shown in the following table. See Appendix B List
of Parameters.
Type
Parameter
Number
Description
Function Selection Constants
Pn000 to Pn003
Select basic and application functions such as the type of
control or the stop mode used when an alarm occurs.
Servo Gain and Other Constants
Pn100 to Pn123
Set numerical values such as speed and position loop
gains.
Position Control Constants
Pn200 to Pn208
Set position control parameters such as the reference
pulse input form and gear ratio.
Speed Control Constants
Pn300 to Pn308
Set speed control parameters such as speed reference
input gain and soft start deceleration time.
Torque Control Constants
Pn400 to Pn409
Set torque control parameters such as the torque reference
input gain and forward/reverse torque limits.
Sequence Constants
Pn500 to Pn512
Set output conditions for all sequence signals and changes
I/O signal selections and allocations.
Others
Pn600 to Pn601
Specify the capacity for an external regenerative resistor
and reserved constants.
Auxiliary Function Execution
Fn000 to Fn014
Execute auxiliary functions such as JOG Mode operation.
Monitor Modes
Un000 to
Un00D
Enable speed and torque reference monitoring, as well as
monitoring to check whether I/O signals are ON or OFF.