Sgdh amplifier ratings and specifications (cont’d) – Yaskawa Sigma II Series Servo System User Manual
Page 374
Sigma II User’s Manual
Chapter 8: Ratings and Characteristics
8 - 44
*4
Forward is clockwise viewed from the non-load side of the servomotor, (counterclockwise viewed
from the load and shaft end).
*1
The built-in open collector power supply is not electrically isolated from the control circuit in the servo amplifier.
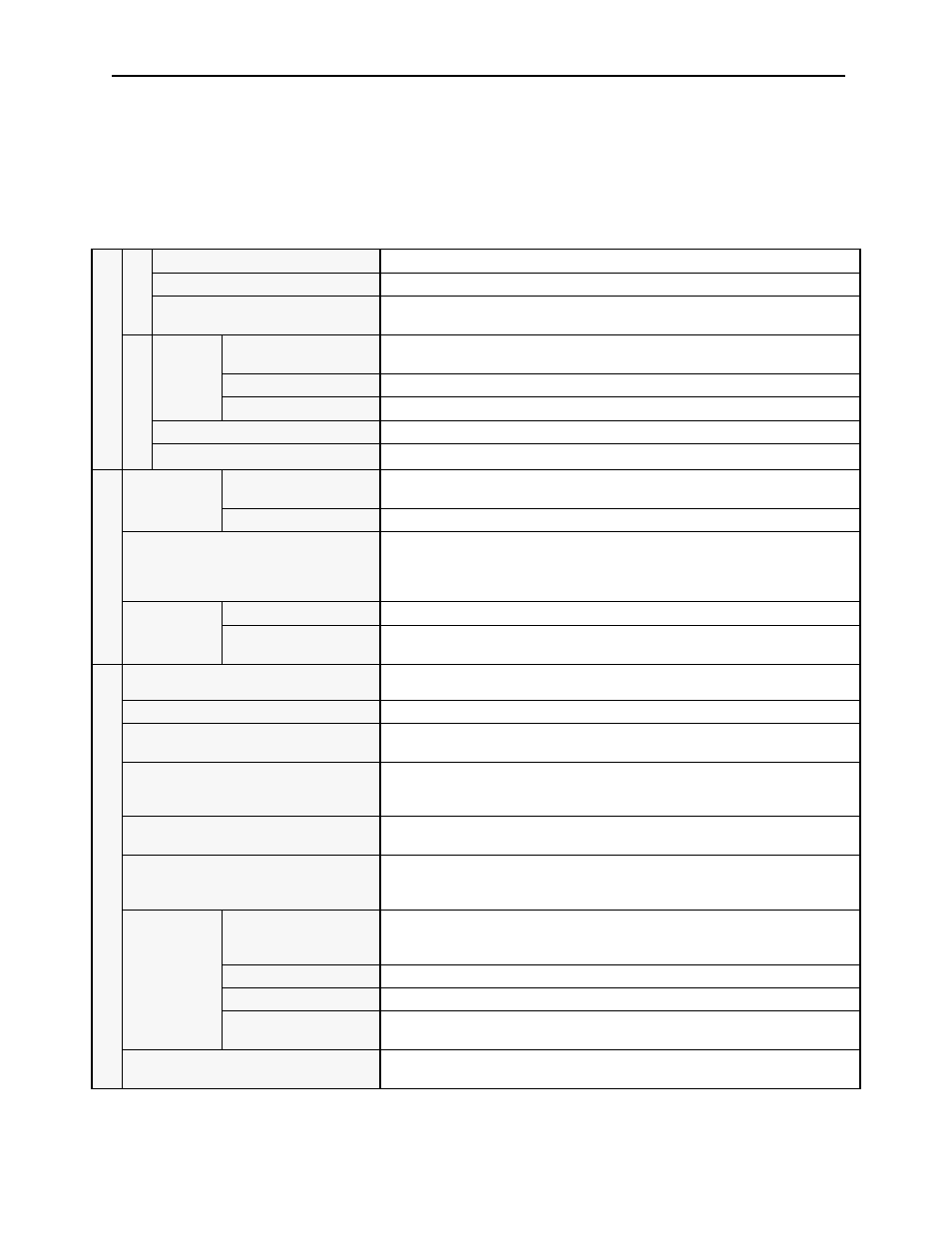
SGDH Amplifier Ratings and Specifications (cont’d)
Posi
tion
ing
Co
ntrol
Mod
e
Per
formance
Bias Setting
0 to 450rpm (setting resolution: 1rpm)
Feed-forward Compensation
0 to 100% (setting resolution: 1%)
Position Complete Width Setting
1 to 250 reference units (setting resolution: 1 reference unit)
In
put Si
gna
l
Refer-
ence Sig-
nal
Type
SIGN + PULSE train, 90
° phase difference 2-phase pulse (phase A + phase B), or
CCW + CW pulse train
Pulse Buffer
Line driver (+5V level), open collector (+5V or +12V level)
Pulse Frequency
Maximum 500/200kpps (line driver/open collector)
Control SIgnal
CLEAR (input pulse form identical to reference pulse)
Built-in Open Collector Power Supply
*1
+12V (With built-in 1k
Ω resistor)
I/O Si
gnal
s
Position Output
Output Form
Phases A, B and C: Line driver output
Phase S: Line driver output (only when absolute encoder is used)
Frequency Dividing Ratio
Any
Sequence Input
Servo ON, P control (or forward/reverse rotation in contact input speed control
mode), forward rotation prohibited (P-OT), reverse rotation prohibited (N-OT),
alarm reset, forward rotation current limit and reverse rotation current limit (or
contact input speed control)
Sequence Out-
put
Servo alarm, 3-bit alarm codes
Select three of the follow-
ing:
Positioning complete (speed coincidence), TGON, servo ready, current limit, brake
release, overload detected
Buil
t-in Fu
nction
s
Dynamic Brake (DB) (Supplied as an option
unit)
Activated at main power OFF, servo alarm, servo OFF or overtravel.
Regenerative Processing
A regenerative resistor must be mounted externally.
Overtravel (OT) Prevention
Motor is stopped by dynamic brake (requires optional dynamic brake unit),
decelerates to a stop, or coasts to a stop when P-OT or N-OT is activated.
Protection
Overcurrent, overload, regenerative error, main circuit voltage error, heat sink
overheat, power open phase, overflow, overspeed, encoder error, encoder
disconnected, overrun, CPU error, parameter error.
LED Display
POWER, ALARM, CHARGE, five 7-segment LEDs, (built-in digital operator
functions)
Analog Monitor (5CN)
Speed: 1V/1000rpm
Torque: 1V/rated torque
Deviation: 0.05V/reference unit or 0.05 V/100 reference units
Comm
unic
ati
on
Interface
Digital operator (mount type or hand-held).
RS422A port such as a personal computer (RS-232C port can be used if some
conditions are met).
1 : N Communication
N can be up to 14 when RS422A port is used.
Axis Address Setting
Set with parameter.
Functions
Status display, user constant setting, monitor display, alarm traceback
display, jogging, autotuning, etc.
Others
Zero-clamp, reverse rotation connection, jog operation, home position search,
automatic servomotor ID.
Speed regulation
no-load motor speed - full-load motor speed
(
)
rated motor speed
-------------------------------------------------------------------------------------------------------------------------x100%
=
⎝
⎠
⎛
⎞