Setting level 2: external torque limit – Yaskawa Sigma II Series Servo System User Manual
Page 97
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 11
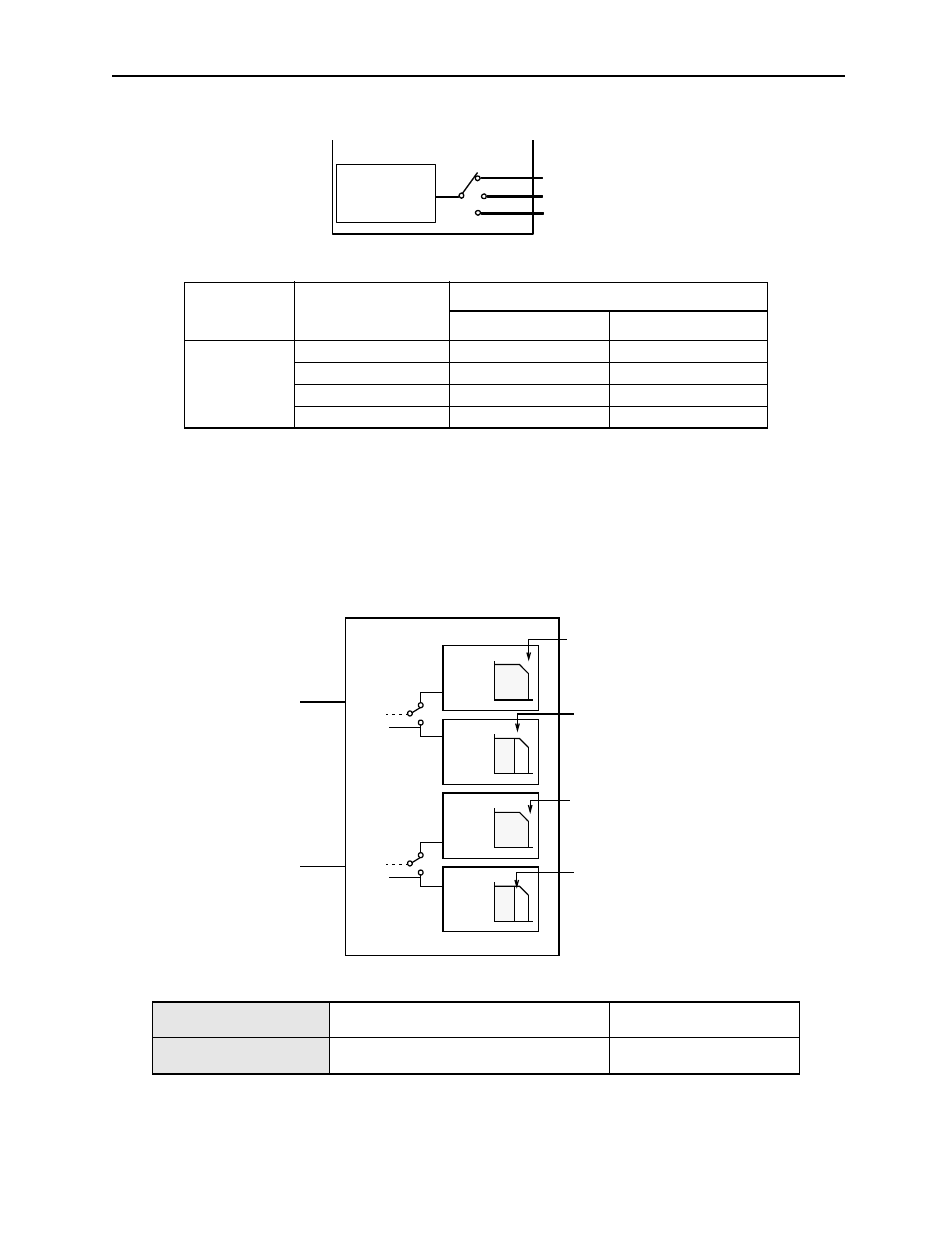
Use the following table to select which terminal will output the /CLT signal.
Note: Multiple signals allocated to the same output circuit are output using OR logic. Set other output
signals to a value other than that allocated to the /CLT signal in order to use just the /CLT output
signal. See 5.3.4 Output Circuit Signal Allocation.
Setting Level 2: External Torque Limit
A contact input signal is used to enable the torque (current) limits previously set in
parameters. Torque limits can be set separately for forward and reverse rotation.
Parameter
Setting
Output Terminal (CN1-)
1
2
Pn50F.0
0
—
—
1
25
26
2
27
28
3
29
30
Input /P-CL CN1-45
Forward External Torque Limit Input
Speed/Torque Control,
Position Control
Output /N-CL CN1-46
Reverse External Torque Limit Input
Speed/Torque Control,
Position Control
Output terminal
CN1-25, 26 (SO1)
CN1-27, 28 (SO2)
CN1-29, 30 (SO3)
CLT
Torque limit
detection
2
3
1
Pn50F.0
/
Rotation
Speed
Rotation
Speed
Rotation
Speed
Rotation
Speed
Forward
rotation
rotation
Reverse
Torque Limit
Torque Limit
Torque Limit
Pn403
Pn403 or Pn405
(limited by whichever
is smaller
Torque Limit
Pn402 or Pn404
(limited by whichever
is smaller
Pn402
/P-CL
CN1-45
/N-CL
CN1-46
Servo amplifier