Yaskawa Sigma II Series Servo System User Manual
Page 449
Sigma II User’s Manual
Appendix B: List of Parameters
B - 9
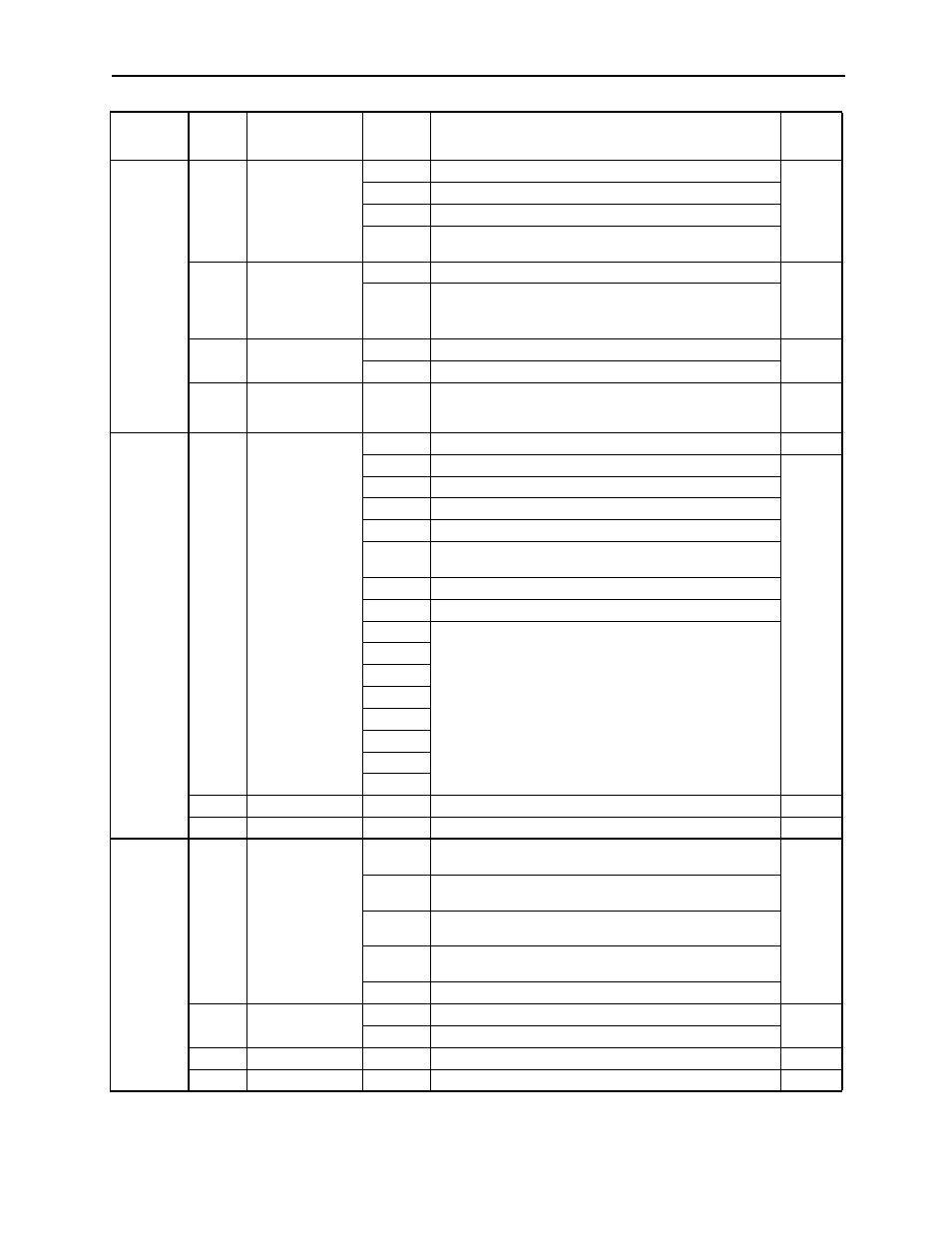
Pn002
Functio
n Se
lection
App
licatio
n Sw
itch
es
0
Speed Control
Option
(T-REF
Terminal
Allocation)
0
None.
0
1
Uses T-REF as an external torque limit input.
2
Uses T-REF as a torque feed-forward input.
3
Uses T-REF as an external torque limit input when
P-CL and N-CL are ON.
1
Torque Control
Option
(V-REF
Terminal
Allocation)
0
None.
0
1
Uses V-REF as an external speed limit input.
2
Absolute
Encoder Usage
0
Uses absolute encoder as an absolute encoder.
0
1
Uses absolute encoder as an incremental encoder.
3
Not used.
0
DO NOT CHANGE
(Turns OFF PG output for full-closed option card,
FC100)PG output is OFF if set to 1.
0
Pn003
Fu
nction Sele
cti
on Appl
ication Switche
s
0
1
Analog
Monitor 1
Torque
Reference
Monitor
Analog
Monitor 2
Speed
Reference
Monitor
0
Motor speed: 1V/1000rpm.
2
1
Speed reference: 1V/1000rpm.
0
2
Torque reference: 1V/100%.
3
Position error: 0.05V/1 reference units.
4
Position error: 0.05V/100 reference units.
5
Reference pulse frequency (converted to rpm): 1V/
1000rpm.
6
Motor speed
× 4: 1V/250rpm.
7
Motor speed
× 8: 1V/125rpm.
8
Reserved parameter (Do not change.).
9
A
B
C
D
E
F
2
Not used.
—
—
0
3
Not used.
—
—
0
Pn10B
Ga
in Appli
cation Switches
0
Mode Switch
Selection
0
Uses internal torque reference as the condition (Level
setting: Pn10C).
0
1
Uses speed reference as the condition (Level
setting: Pn10D).
2
Uses acceleration as the condition (Level setting:
Pn10E).
3
Uses error pulse as the condition (Level setting:
Pn10F).
4
No mode switch function available.
1
Speed Loop
Control Method
0
PI control.
0
1
IP control.
2
Not used.
0
—
0
3
Reserved
0 to 2
Reserved parameter. (Do not change).
0
Parameter
Digit
Place
Name
Setting
Description
Default
Setting