Yaskawa Sigma II Series Servo System User Manual
Page 266
Sigma II User’s Manual
Chapter 6: Servo Adjustment
6 - 34
first increase the speed loop gain. If only the position loop gain is increased,
oscillation will result in the speed reference and positioning time will increase,
not decrease.
Position loop gain can be increased only to the point where oscillation begins in
the mechanical system.
•
If the position loop response is faster than the speed loop response, speed refer-
ence output from the position loop cannot follow the position loop response due
to the slower speed loop response. Therefore, the position loop will keep accu-
mulating errors, thus increasing the amount of speed reference output.
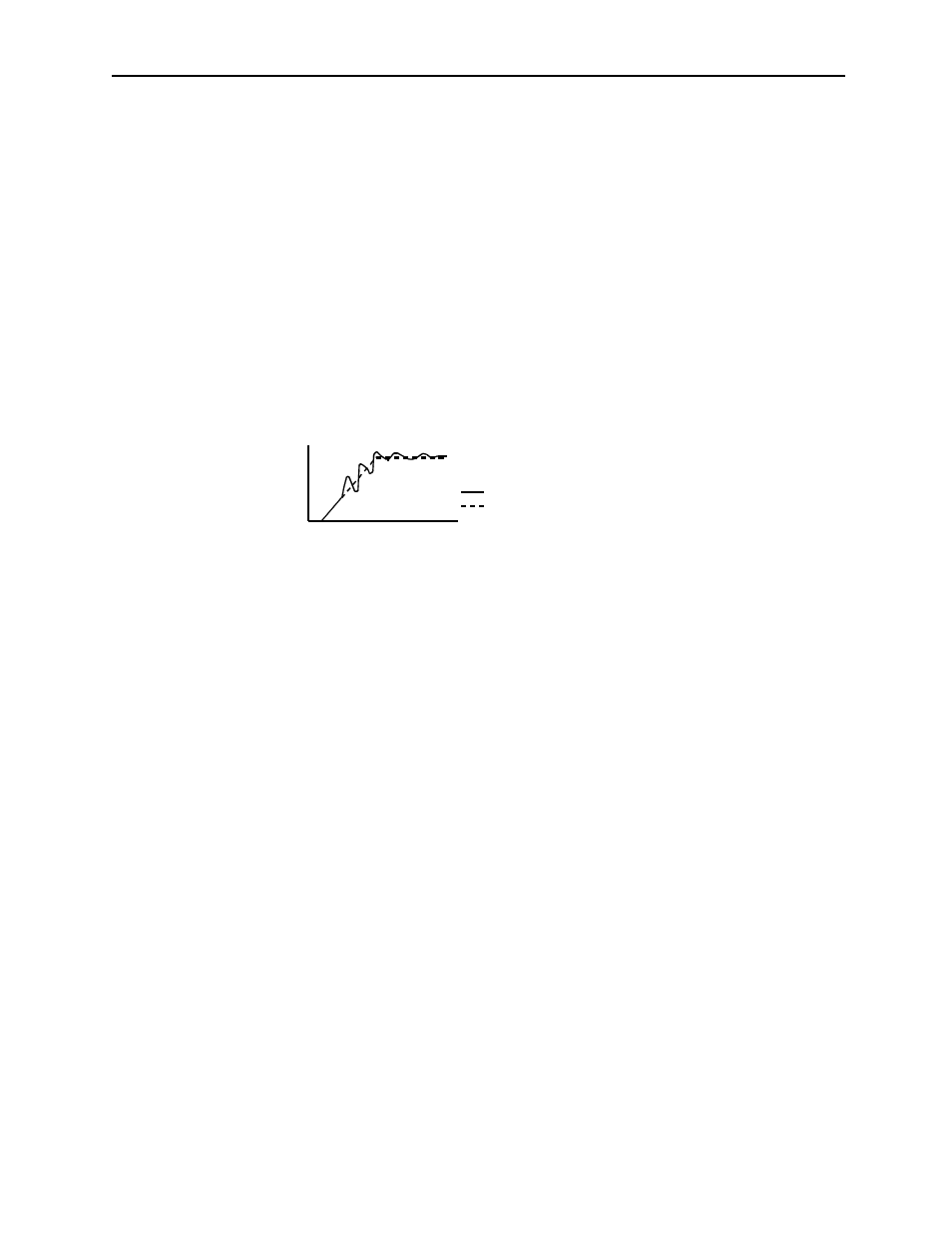
As a result, the motor speed will be excessive and the position loop will try to
decrease the amount of speed reference output. The speed loop responsiveness
degrades, and the motor will not be able to follow. The speed reference will
oscillate as shown in the following graph. If this happens, reduce the position
loop gain or increase the speed loop gain.
•
The position loop gain must not exceed the natural frequency of the mechanical
system. For example, if the mechanical system is an articulated robot, the rigid-
ity of the machinery mechanism is very low because the mechanism incorporates
a harmonic gear reducer and the natural frequency of the mechanical system is 10
to 20Hz. In this case, the position loop gain can be set to 10 to 20(s
-1
).
If the mechanical system is a chip mounting machine, IC bonding machine, or
high-precision machining tool, the natural frequency of the system is 70Hz or
more. Therefore, the position loop gain can be set to 70(s
-1
) or higher.
When high responsiveness is required, it is not only important to ensure the
responsiveness of the servo system (the controller, servo amplifier, motor, and
encoder), but it is also necessary to ensure that the mechanical system have high
rigidity.
Speed
reference
Time
Actual speed reference output from controller.
Speed reference as a result of calculation in controller.