3 using proportional control, 3 using proportional control - 13, Using proportional control -13 – Yaskawa Sigma II Series Servo System User Manual
Page 245: Methods for using proportional control
Sigma II User’s Manual
Chapter 6: Servo Adjustment
6 - 13
6.2.3
Using Proportional Control
If parameter Pn000.1 is set to 0 or 1 as shown below, input signal /P-CON serves as
a PI/P control changeover switch.
•
PI control: Proportional/integral control.
•
P control: Proportional control.
Methods for Using Proportional Control
Proportional control can be used in the following two ways.
•
When operation is performed by sending speed references from the host control-
ler to the servo amplifier, the host controller can selectively use P control mode
for particular conditions only. This method can suppress overshooting and
shorten setting time. Refer to 6.2.5 Using Mode Switch for particular conditions.
•
If PI control mode is used when the speed reference has a reference offset, the
motor may rotate at a very slow speed and fail to stop even if 0 is specified as a
speed reference. In this case, use P control mode to stop the motor.
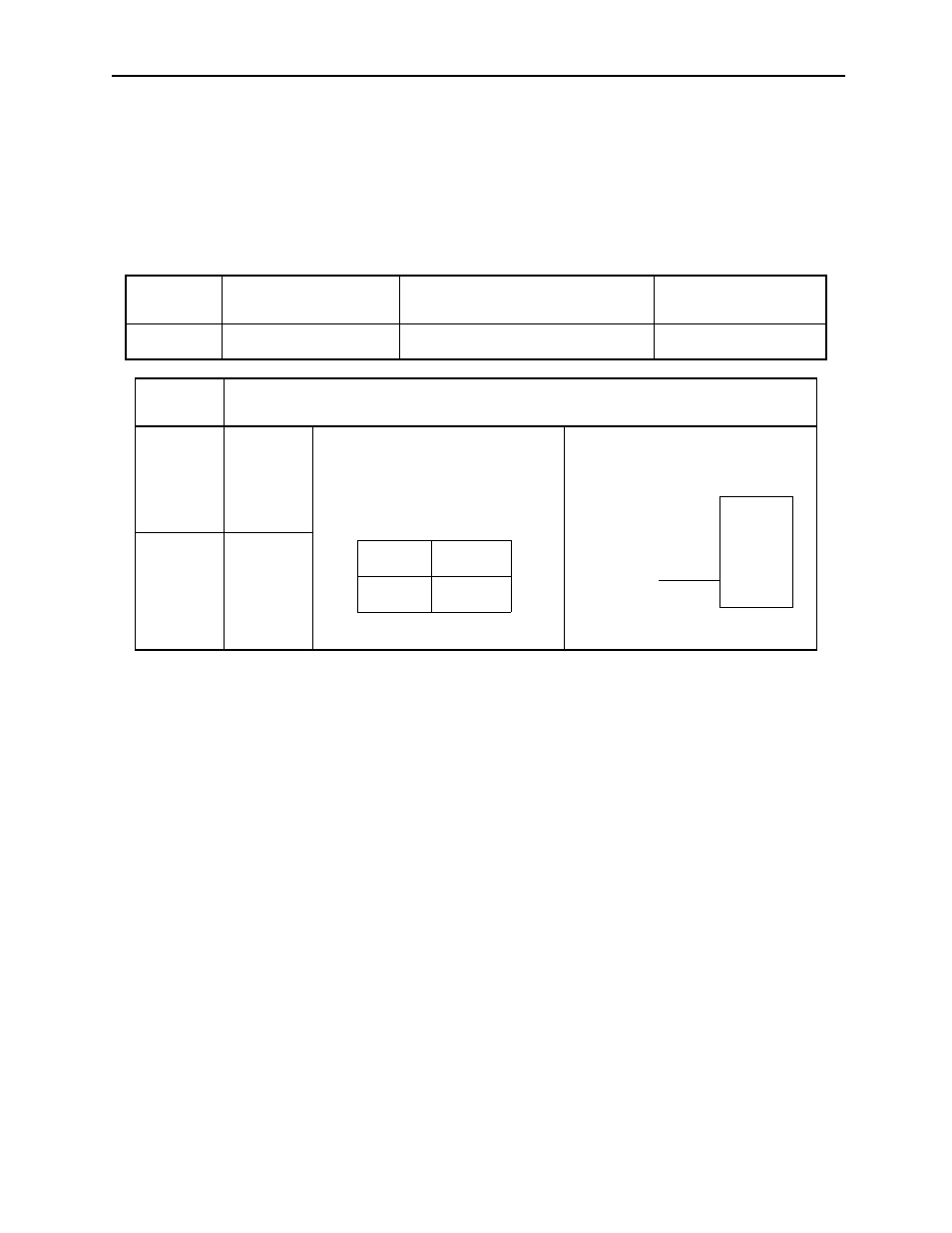
Parameter
Signal
Setting
(%)
Application
Pn000.1
Control Method Selection
Default Setting: 0
Speed Control,
Position Control
Pn000.1
Setting
Control Mode
0
Speed
Control
Usual speed control or position
control is selected.
Input signal /P-CON (CN1-41) is used
to select PI control or P control.
1
Position
Control
CN1-41
is open.
PI control
CN1-41
is 0V
P control
P or PI
control
selection
CN1-41
/P-CON
Servo amplifier