Overload protection for self-cooling linear motors – Yaskawa Sigma II Series Servo System User Manual
Page 230
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5-144
Overload Protection for Self-cooling Linear Motors
The linear motor has a self-cooling effect because of its moving coil. Therefore, the
calculation of motor-side overload is modified, taking this cooling effect into
account.
The equation is modified so that a square of thrust reference is reduced in proportion
to the motion speed of linear motor’s moving coil.
The factor of proportionality is calculated on the base of speed FB and the newly
added parameter.
An alarm occurs under the following condition.
Overload level <
Σ{(Thrust reference
2
×
d)
− Reference thrust
2
}
d is obtained by the following equation.
d = 1
−{(FB speed / Maximum speed)
×
(
Parameter / 100)}
5.11.4 Supporting Function for Linear Motor with Hall Sensor
The hall sensor monitoring function is added for linear motors with a Hall sensor.
Operation Procedure
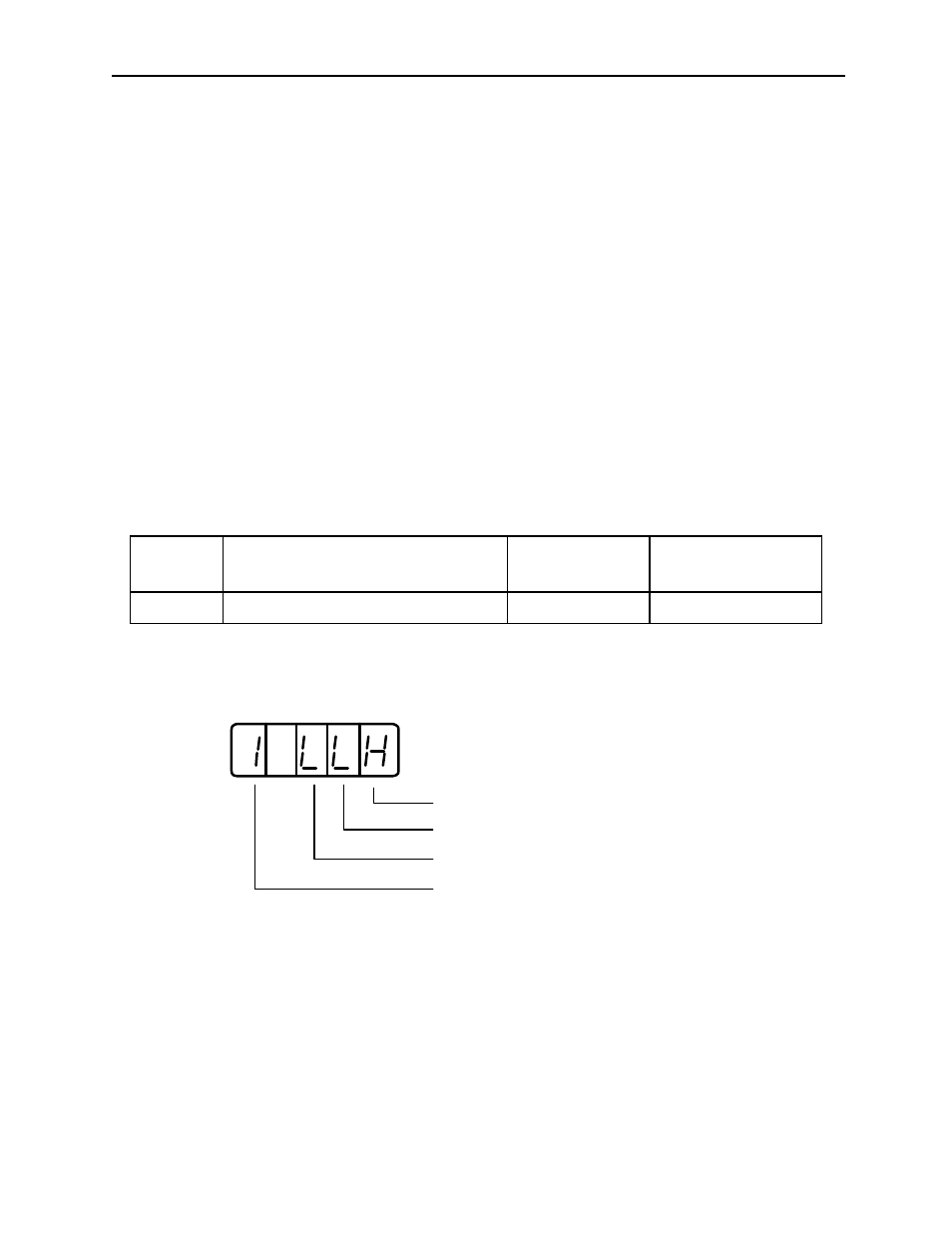
Select the parameter Un011, and press DATA/ENTER Key. The Hall sensor signal
is displayed as shown below.
Parameter
No.
Displayed Item
Unit
Remarks
Un011
Hall sensor signal monitor
–
–
W-phase signal monitor
V-phase signal monitor
U-phase signal monitor
ポールセンサ信号パターン
Hall sensor signal pattern