Setting position loop gain – Yaskawa Sigma II Series Servo System User Manual
Page 243
Sigma II User’s Manual
Chapter 6: Servo Adjustment
6 - 11
Setting Position Loop Gain
Set the following position loop-related parameter as required.
The above parameter is the position loop gain for the servo amplifier.
The higher the position loop gain, the smaller the position control error will be.
There is, however, a certain limit depending on machine characteristics.
This gain setting is also valid for zero clamp operation.
The above parameter is automatically set by the auto-tuning operation.
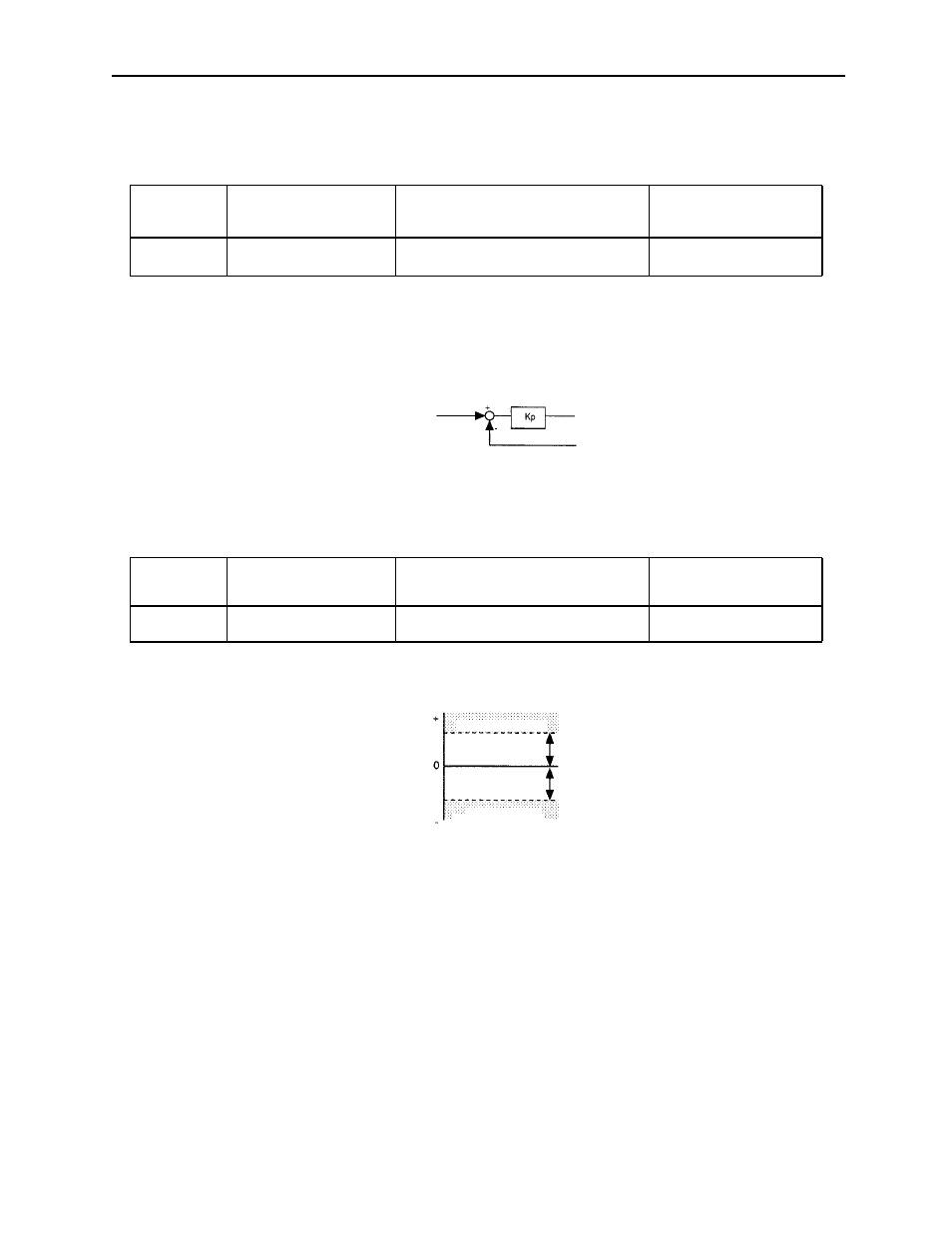
Set in this parameter the error pulse level at which a position error pulse overflow
alarm (A.d0) is detected.
If the machine permits only a small position loop gain value to be set in Pn102, an
overflow alarm may arise during high speed operation. In this case, increase the
value set in this parameter to avoid unnecessary alarms.
Parameter
Signal
Setting
(s
-1
)
Application
Pn102
Position Loop Gain
(K
P
)
Setting Range: 0 to 2000
Default Setting: 0
Position Control
Parameter
Signal
Setting
(256 reference units)
Application
Pn505
Overflow Level
Setting Range: 1 to 32767
Default Setting: 1024
Position Control
Position reference
Position loop gain
Position feedback
Normal control
Error pulse
Alarm (A.d0)
Alarm (A.d0)
Pn505