Incremental pulses and origin pulses, Setting the pulse dividing ratio – Yaskawa Sigma II Series Servo System User Manual
Page 194
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5-108
Note: 1. The absolute position data within one revolution is the value before dividing.
2. Absolute position data increases during forward rotation. (Not valid in reverse rotation mode).
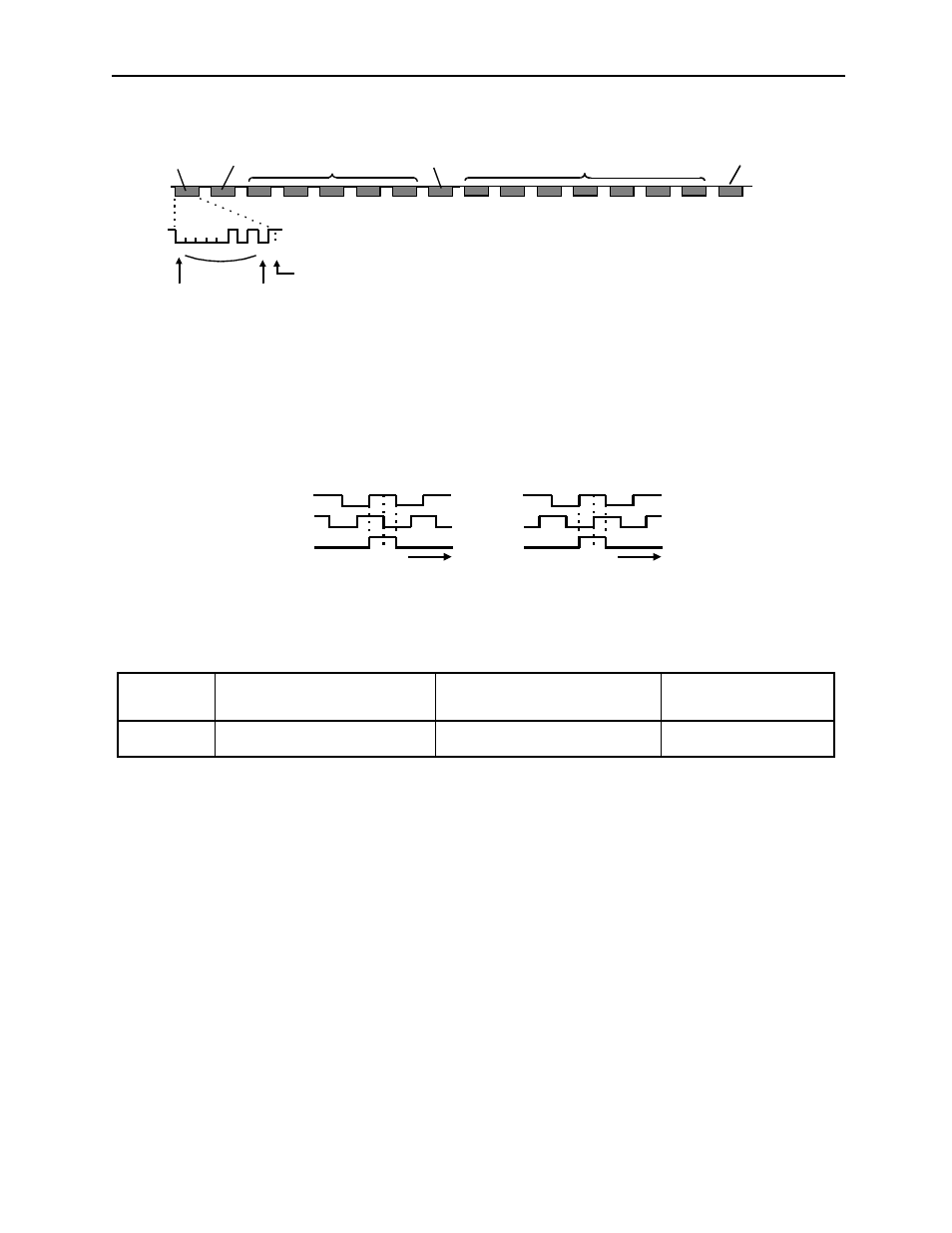
Incremental Pulses and Origin Pulses
Just as with normal incremental pulses, initial incremental pulses which provide
absolute data are first divided by the frequency divider inside the servo amplifier and
then output.
Setting the Pulse Dividing Ratio
Use the following parameter to set the pulse dividing ratio.
This parameter sets the number of output pulses for PG output signals (PAO, /PAO,
PBO, /PBO).
Pulses from the motor encoder (PG) are divided by the number of pulses set here
before being output.
The set value is the number of output pulses per revolution. Set this value according
to the reference unit of the machine or controller to be used.
Parameter
Signal
Setting
(PPR)
Description
Pn201
PG Divider
Setting Range: 16 to 16384
Default Setting: 16384
Speed/Torque Control,
Position Control
0 0 0 0 0 1 0 1 0
Data
Start bit
Even parity
1
Stop bit
Absolute position within one revolution
"0" to "9" "CR"
Number of revolutions:
“P” “+” or “-” “0” to “9" ","
Forward rotation
Phase A
Reverse rotation
t
t
Phase B
Phase C
Phase A
Phase B
Phase C