2 position control by host controller, 2 position control by host controller - 12, Position control by host controller -12 – Yaskawa Sigma II Series Servo System User Manual
Page 84
Sigma II User’s Manual
Chapter 4: Trial Operation
4 - 12
4.2.2
Position Control by Host Controller
If the position control algorithm of the host controller has not been established or
finalized, disconnect the servomotor from the equipment before performing a trial
operation. This will prevent the servomotor from running out of control and
damaging the equipment.
Check servomotor operation as described in the following table.
Controller
Reference
Check
Procedure
Description
JOG Operation
(Constant
Reference Speed
Input from Host
Controller)
Motor speed
Check motor speed as follows:
• Use the speed monitor (Un000) on
the panel operator.
• Run the servomotor at low speed.
Input a reference speed of 60rpm, for
example, to see if the servomotor
makes one revolution per second.
Check the parameter
setting at Pn300 to see
if the reference speed
gain is correct.
Simple
Positioning
Number of motor
rotations
Input a reference equivalent to one
servomotor rotation and visually check
to see if the shaft makes one
revolution.
Check the parameter
setting at Pn201 to see
if the number of dividing
pulses is correct.
Overtravel
(P-OT and
N-OT Used)
Whether the servo-
motor stops rotating
when P-OT and N-OT
signals are applied
Check to see if the servomotor stops
when P-OT and N-OT signals are input
during continuous servomotor
operation.
Review P-OT and N-OT
wiring if the servomotor
does not stop.
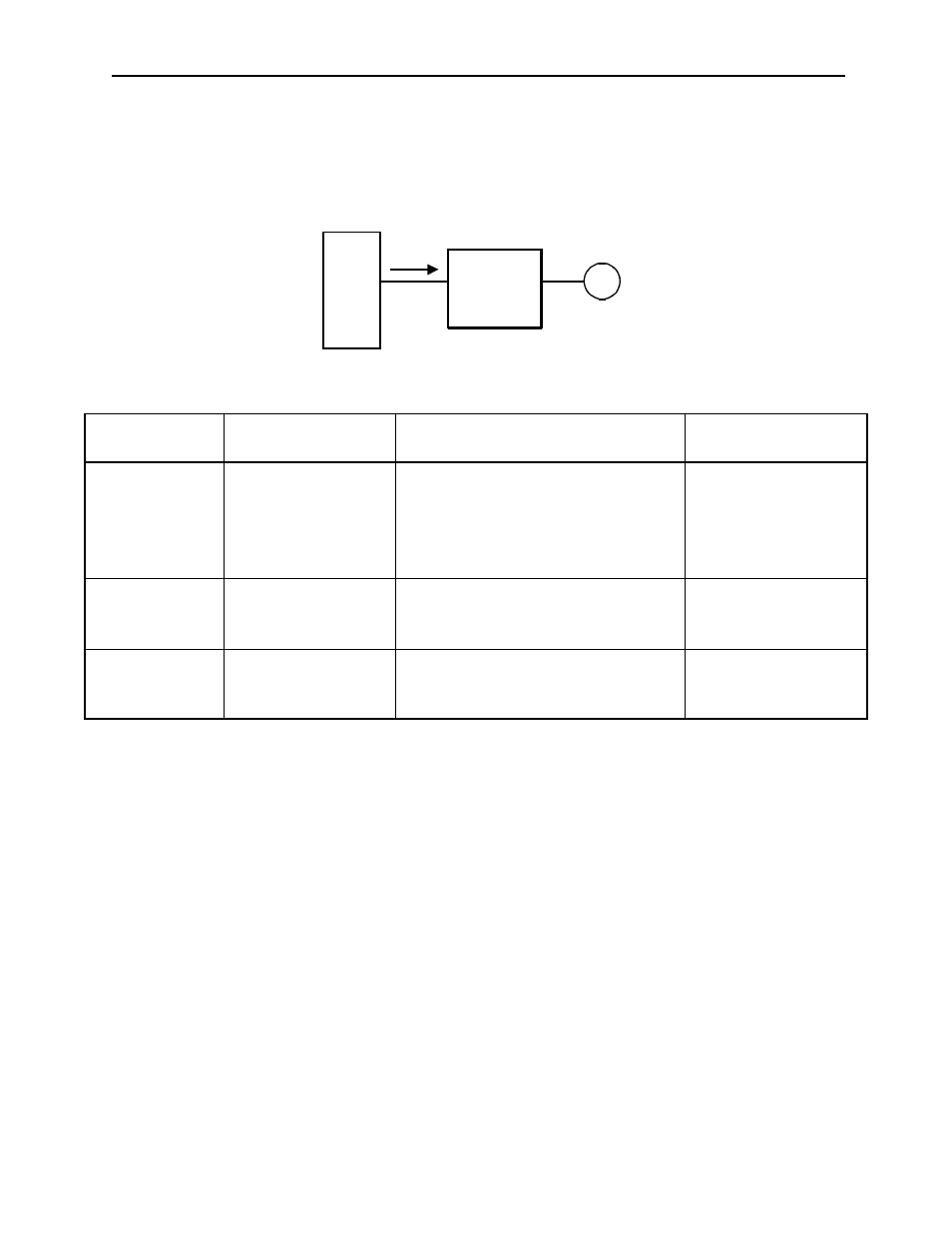
Trial operation for
servomotor without load
M
Host
controller
Position control
Speed control
Reference
speed
SGDH
servo
amplifier