6 vibration resistance, 6 vibration resistance - 5, Vibration resistance -5 – Yaskawa Sigma II Series Servo System User Manual
Page 33
Sigma II User’s Manual
Chapter 2: Installation
2 - 5
2.1.6
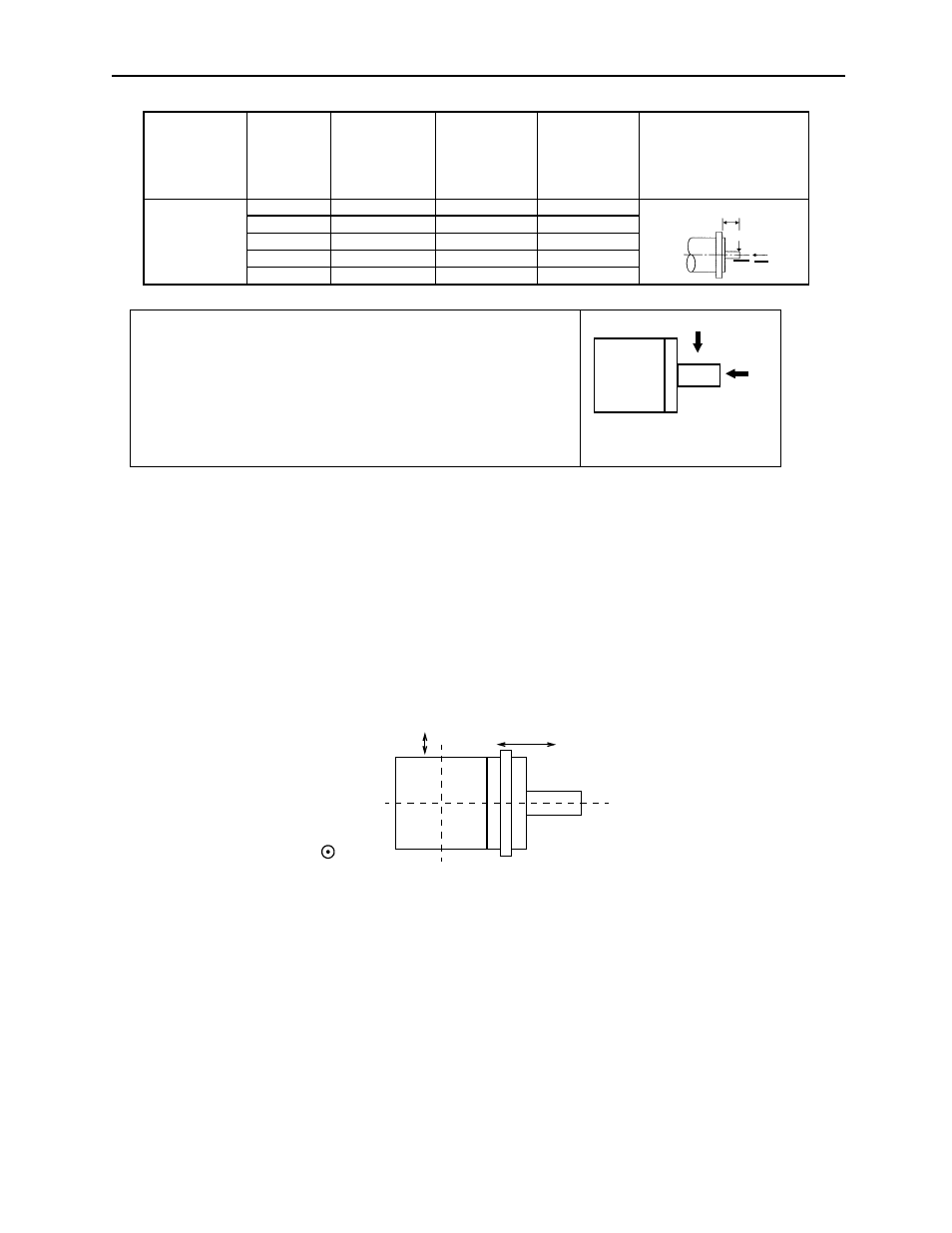
Vibration Resistance
Mount the servomotor with the shaft positioned horizontally. The servomotor will
withstand the following levels of vibration on all three axes: front-to-back (X),
vertical (Y), and side-to-side (Z).
•
SGMAH, SGMPH: 49m/s
2
(5G)
•
SGMSH, SGMGH, SGMDH, SGMUH, and SGMBH: 24.5m/s
2
(2.5G)
SGMBH
2B
5880 (1322)
2156 (485)
100 (3.94)
3Z
6272 (1410)
2156 (485)
100 (3.94)
3G
7448 (1675)
2156 (485)
100 (3.94)
4EA
7840 (1763)
2156 (485)
100 (3.94)
5EA
8428 (1895)
2156 (485)
100 (3.94)
Servomotor
MODEL
Allowable
Radial Load
F
r
Lb
f
(N)
Allowable
Thrust Load
F
s
Lb
f
(N)
LR
in (mm)
Reference Diagram
LR
Fr
Fs
Servomotor
Shaft end
F
r
F
s
Thrust and radial loads:
Thrust load (F
s
):
Radial load (F
r
):
Note:
Shaft-end load applied parallel to the
centerline of the shaft.
Shaft-end load applied perpendicular
to the centerline of the shaft.
Vertical
Side-to-side
Front-to-back
Horizontal shaft
Impact applied to the servomotor