Yaskawa G7 Drive User Manual
Page 163
5
-52
C
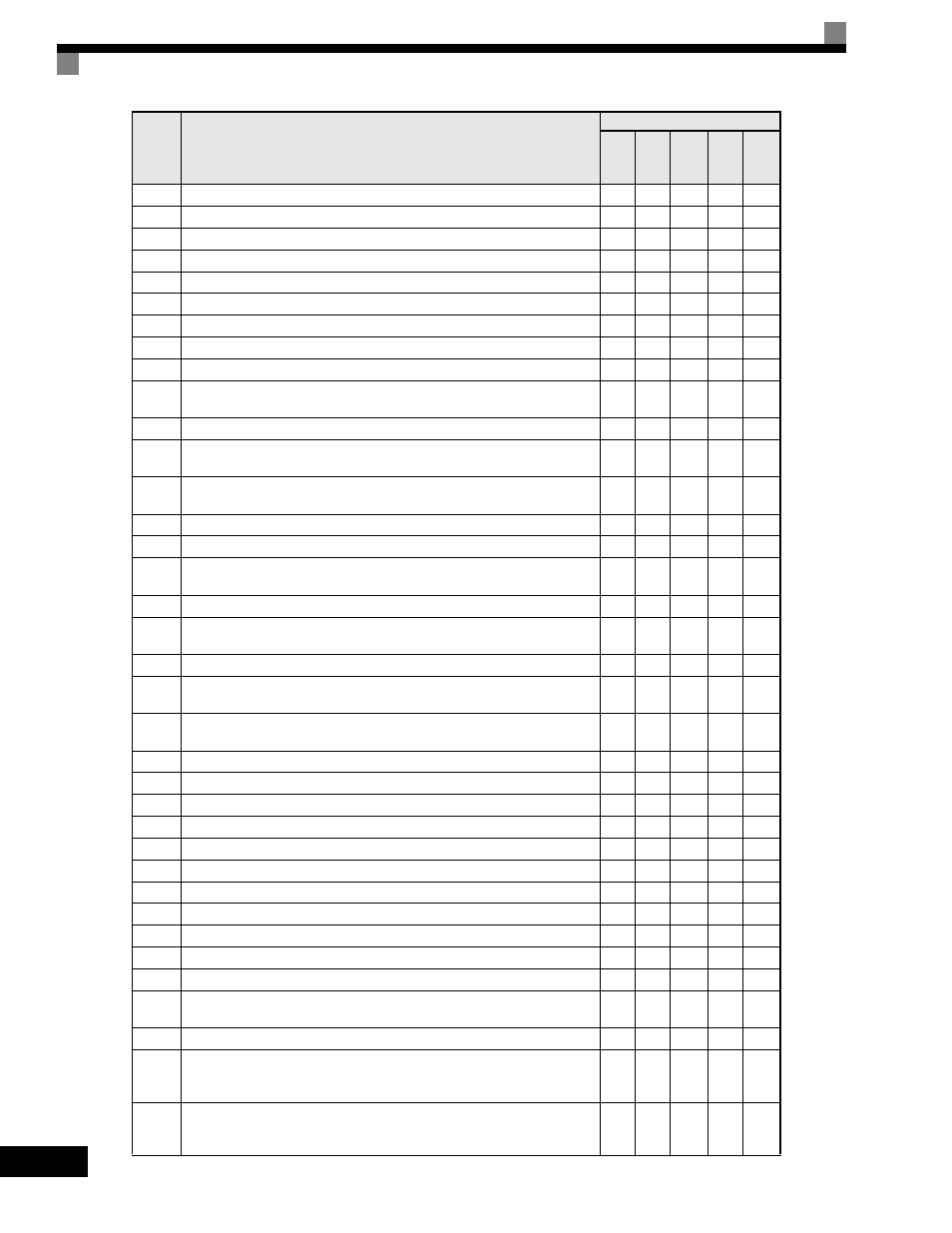
Multi-function analog input selection (ON: Enable)
Yes
Yes
Yes
Yes
Yes
D
No V/f control with PG (ON: Speed feedback control disabled,) (normal V/f control)
No
Yes
No
No
No
E
Speed control integral reset (ON: Integral control disabled)
No
Yes
No
Yes
Yes
F
Not used (Set when a terminal is not used)
-
-
-
-
-
10
Up command (Always set with the down command)
Yes
Yes
Yes
Yes
Yes
11
Down command (Always set with the up command)
Yes
Yes
Yes
Yes
Yes
12
FJOG command (ON: Forward run at jog frequency d1-17)
Yes
Yes
Yes
Yes
Yes
13
RJOG command (ON: Reverse run at jog frequency d1-17)
Yes
Yes
Yes
Yes
Yes
14
Fault reset (Reset when turned ON)
Yes
Yes
Yes
Yes
Yes
15
Emergency stop. (Normally open condition: Deceleration to stop in deceleration
time set in C1-09 when ON.)
Yes
Yes
Yes
Yes
Yes
16
Motor switch command (Motor 2 selection)
Yes
Yes
Yes
Yes
Yes
17
Emergency stop (Normally closed condition: Deceleration to stop in deceleration
time set in C1-09 when OFF)
Yes
Yes
Yes
Yes
Yes
18
Timer function input (Functions are set in b4-01 and b4-02 and the timer function
outputs are set in H1- and H2-.)
Yes
Yes
Yes
Yes
Yes
19
PID control disable (ON: PID control disabled)
Yes
Yes
Yes
Yes
Yes
1A
Accel/Decel time 2
Yes
Yes
Yes
Yes
Yes
1B
Parameters write enable (ON: All parameters can be written-in. OFF: All
parameters other than frequency monitor are write protected.)
Yes
Yes
Yes
Yes
Yes
1C
Trim control increase (ON: d4-02 frequency is added to analog frequency reference.)
Yes
Yes
Yes
Yes
Yes
1D
Trim control decrease (ON: d4-02 frequency is subtracted from analog frequency
reference.)
Yes
Yes
Yes
Yes
Yes
1E
Analog frequency reference sample/hold
Yes
Yes
Yes
Yes
Yes
20 to
2F
External fault (Desired settings possible)
Input mode: NO contact/NC contact, Detection mode: Normal/during operation
Yes
Yes
Yes
Yes
Yes
30
PID control integral reset (reset when reset command is input or when stopped
during PID control)
Yes
Yes
Yes
Yes
Yes
31
PID control integral hold (ON: Hold)
Yes
Yes
Yes
Yes
Yes
32
Multi-step speed reference 4
Yes
Yes
Yes
Yes
Yes
34
PID soft starter
Yes
Yes
Yes
Yes
Yes
35
PID input characteristics switch
Yes
Yes
Yes
Yes
Yes
60
DC injection braking command (ON: Performs DC injection braking)
Yes
Yes
Yes
Yes
Yes
61
External search command 1 (ON: Speed search from maximum output frequency)
Yes
No
Yes
No
Yes
62
External search command 2 (ON: Speed search from set frequency)
Yes
No
Yes
No
Yes
63
Field weakening command (ON: Field weakening control set for d6-01 and d6-02) Yes
Yes
No
No
No
64
External speed search command 3
Yes
Yes
Yes
Yes
Yes
65
KEB (deceleration at momentary power loss) command (NO contact)
Yes
Yes
Yes
Yes
Yes
66
KEB (deceleration at momentary power loss) command (NO contact)
Yes
Yes
Yes
Yes
Yes
67
Communications test mode (“Pass” is displayed when the communications test is
passed.)
Yes
Yes
Yes
Yes
Yes
68
High-slip braking (HSB)
Yes
Yes
No
No
No
69
Jog 2
Closed = Drive runs at frequency reference entered into parameter d1-17.
Direction is determined by FWD/REV input. Three-wire control only
No
Yes
Yes
Yes
Yes
6A
Drive Enable
Closed = Drive will accept run command.
Open = Drive will not run. If running , drive will stop per b1-03.
Yes
Yes
Yes
Yes
Yes
Setting
Value
Function
Control Methods
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2