Speed estimation: n4 – Yaskawa G7 Drive User Manual
Page 187
5
-76
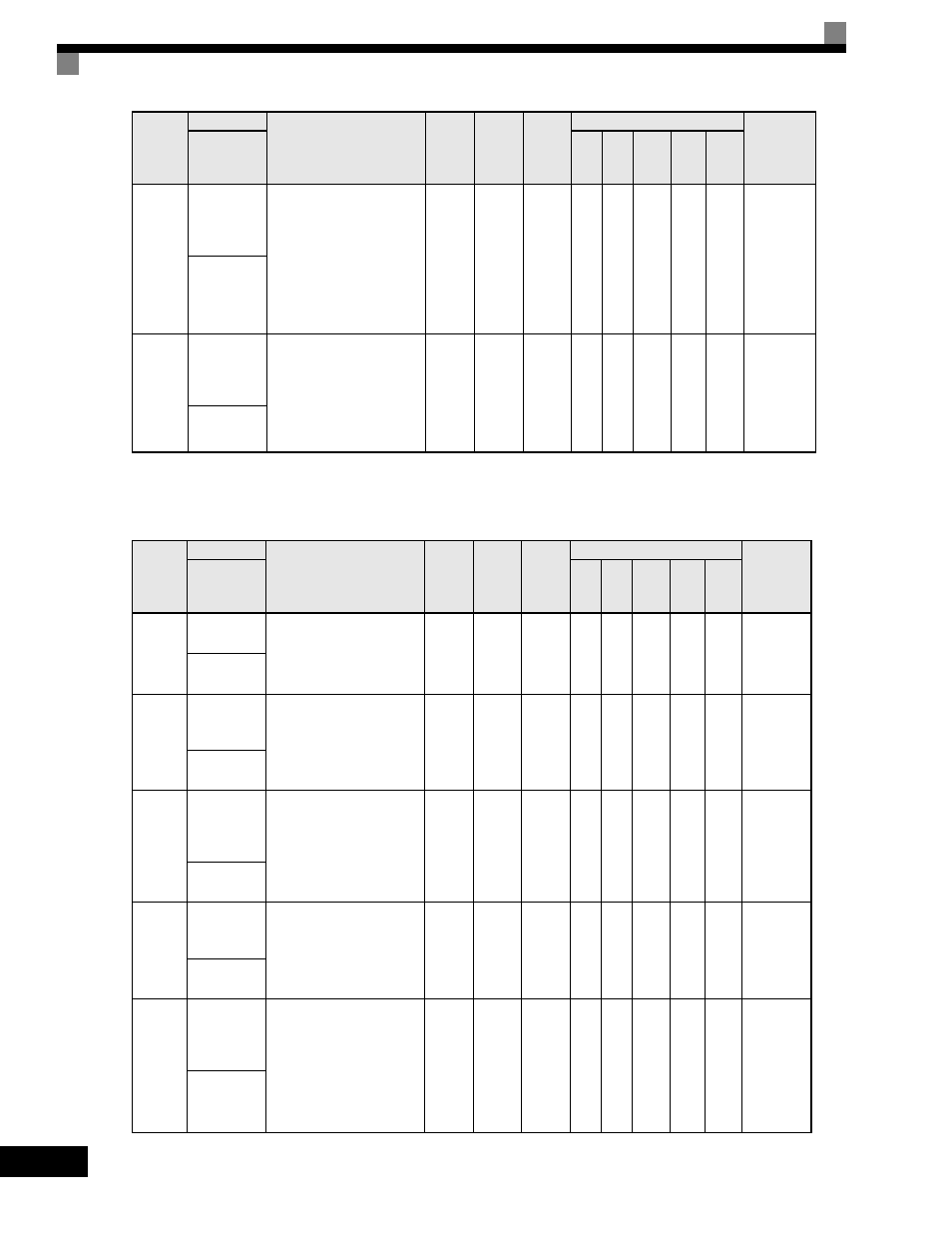
Speed Estimation: n4
User parameters for speed estimation are shown in the following table.
n3-03
High Slip
Braking
Dwell Time
at Stop
Sets the amount of time the
Drive will dwell at E1-09
(Minimum Frequency) at the
end of deceleration. If this
time is set too low, the
machine inertia can cause the
motor to rotate slightly after
the HSB stop is complete and
the Drive output is shut off.
0.0
to
10.0
1.0sec
No
A
A
No
No
No
58AH
HSB Dwell
Time
n3-04
High Slip
Braking
Overload
Time
Sets the time required for an
HSB overload fault (OL7) to
occur when the Drive output
frequency does not change for
some reason during an HSB
stop. Normally this does not
need to be adjusted.
30
to
1200
40sec
No
A
A
No
No
No
58BH
HSB OL
Time
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Operation
Control Methods
MODBUS
Register
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2
n4-07
Observer
Integral Time Set the integral time of the
speed estimator for PI
control.
0.000
to
9.999
0.030m
s
No
No
No
No
No
A
59AH
SPD EST I
Time
n4-08
Observer
Proportional
Gain
Set the proportional gain of
the speed estimator for PI
control.
0
to
1000
15
No
No
No
No
No
A
59BH
SPD EST P
GAIN
n4-10
High-speed
Observer
Proportional
Gain
Sets the P-gain on the hi-
speed side of the Observer (PI
Controls). Operates at the
same proportional gain as
N4-07 when set to zero.
0.0
to
1000.0
15
No
No
No
No
No
A
59DH
OBS Gain H-
SPD
n4-11
Observer
Switching
Frequency
Sets the switching frequency
for the high and low speed
Observer.
40
to
70
70Hz
No
No
No
No
No
A
59EH
Speed
Change F
n4-15
Lo-Speed +
Regen
Stability
Coefficient
Use a large setting if load
tolerance needs to be
increased during low-speed
regeneration. If the setting is
too high, then torque
command monitor and the
actual torque system will be
weakened.
0.0
to
3.0
0.3
No
No
No
No
No
A
5A2H
PH Comp
Lim Gain
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Operation
Control Methods
MODBUS
Register
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2