Preventing motor stalling during operation, Related parameters, Preventing motor stalling during operation -44 – Yaskawa G7 Drive User Manual
Page 261: Setting precautions
6
-44
Setting Precautions
•
When the torque limit function is operating, control and compensation of the motor speed is disabled
because torque control is given priority.
•
When using the torque limit to raise and lower loads, do not carelessly lower the torque limit value, as this
may result in the motor falling or slipping.
•
Torque limits using an analog input are the upper limit value (during 10Vor 20mA input) of 100% of the
motor rated torque. To make the torque limit value during 10Vor 20mA input 150% of the rated torque, set
the input terminal gain to 150.0 (%). Adjust the gain for multi-function analog input terminal A2 using H3-
10 and for multi-function analog input terminal A3 using H3-06.
•
The torque limit accuracy is ±5% at the output frequency of 10Hz or above. When output frequency is less
than 10Hz, accuracy is lowered.
Preventing Motor Stalling During Operation
Stall prevention during operation prevents the motor from stalling by automatically lowering the Drive's out-
put frequency when a transient overload occurs while the motor is operating at a constant speed.
Stall prevention during operation is enabled only during V/f control. If the Drive output current continues to
exceed the setting in parameter L3-06 for 100ms or longer, the motor speed is reduced. Set whether to enable
or disable deceleration time using parameter L3-05. Set the deceleration time using C1-02 (Acceleration time
1) or C1-04 (Acceleration Time 2).
If the Drive output current reaches the set value in L3-06 - 2% (Drive Rated Output Current), the motor will
accelerate again at the frequency set or the acceleration time set.
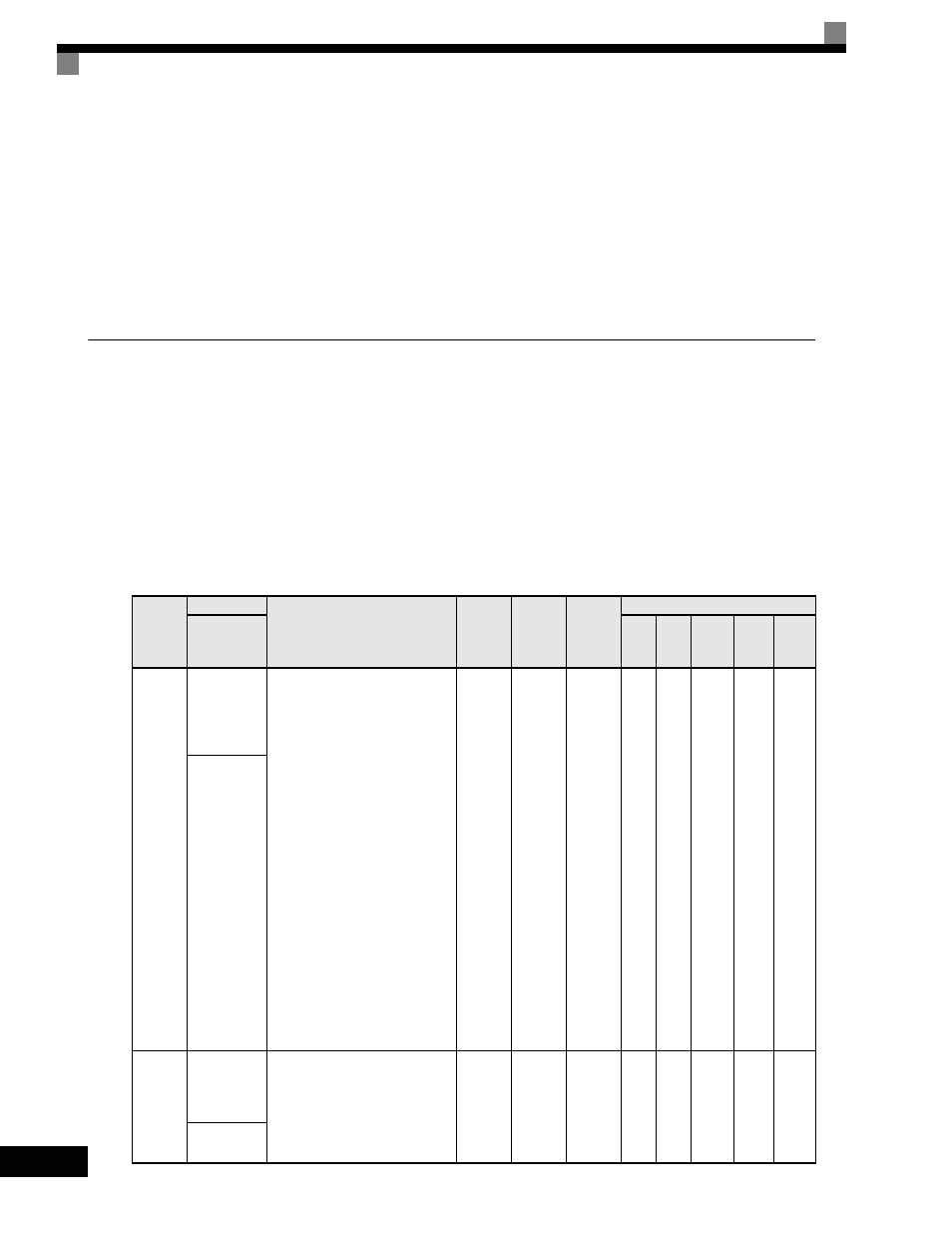
Related Parameters
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Operation
Control Methods
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2
L3-05
Stall
Prevention
Selection
During
Running
Selects the stall prevention method
to use to prevent Drive faults
during run.
0: Disabled - Drive runs a set
frequency. A heavy load may
cause the Drive to trip on an OC
or OL fault.
1: Decel Time 1 - In order to avoid
stalling during heavy loading,
the Drive will decelerate at
Decel time 1 (C1-02) if the
output current exceeds the level
set by L3-06. Once the current
level drops below the L3-06
level, the Drive will accelerate
back to its frequency reference
at the active acceleration rate.
2: Decel Time 2 - Same as setting 1
except the Drive decelerates at
Decel Time 2 (C1-04).
When output frequency is 6Hz or
less, stall prevention during run is
disabled regardless of the setting in
L3-05.
0 to 2
1
No
A
A
No
No
No
StallP Run
Sel
L3-06
Stall
Prevention
Level During
Running
This parameter is enabled when L3-
05 is set to "1" or "2". Drive rated
current is set as 100%.
Decrease the set value if stalling or
excessive current occurs with the
factory settings.
30 to
200
160%
No
A
A
No
No
No
StallP Run
Level