Pid control methods, Pid target value input methods, Pid feedback input methods – Yaskawa G7 Drive User Manual
Page 319
6
-102
PID Control Methods
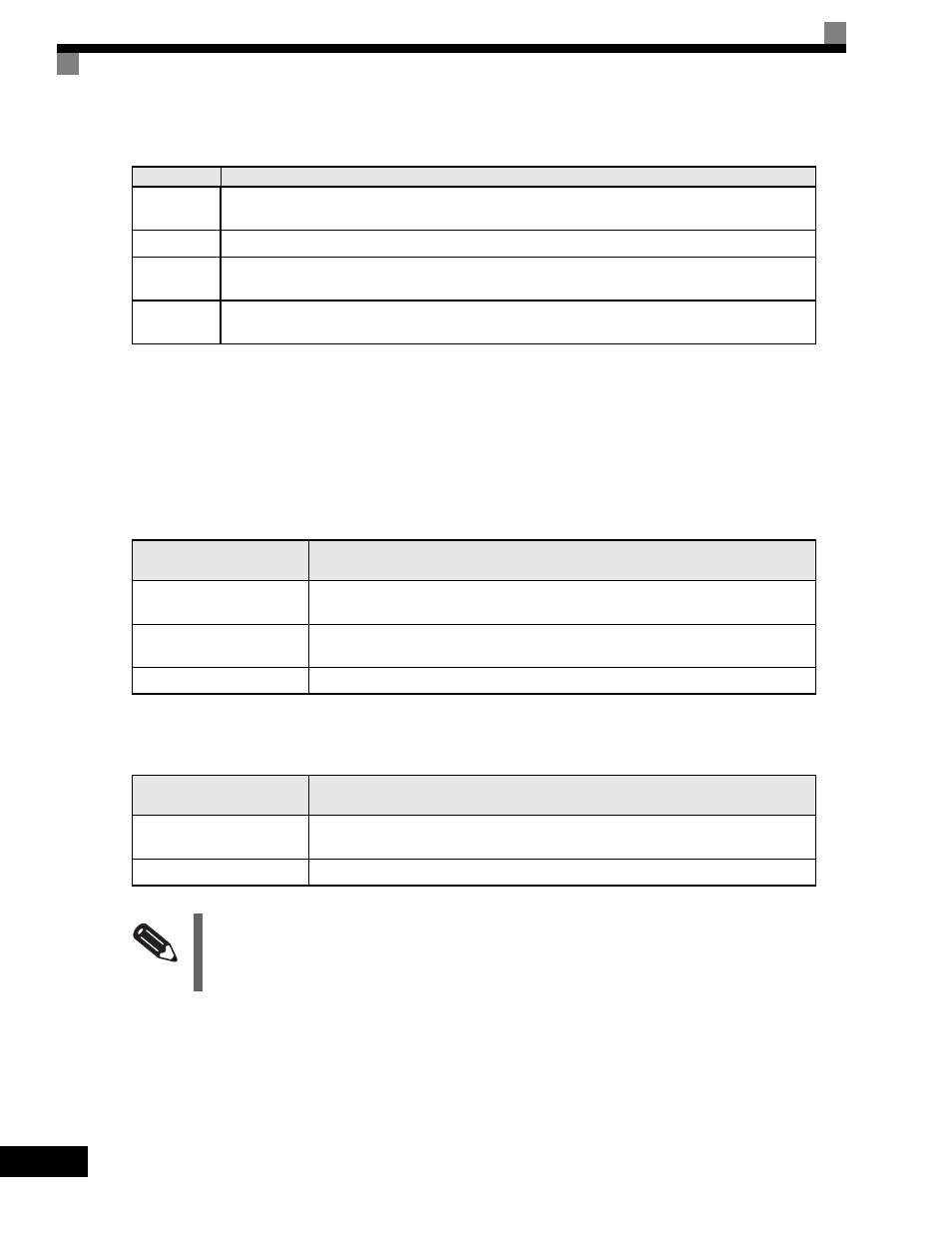
There are four PID control methods. Select the method by setting parameter b5-01.
PID Input Methods
Enable PID control using parameter b5-01, and set the PID target value and PID feedback value.
PID Target Value Input Methods
Select the PID control target value input method according to the setting in b1-01 (Reference Selection).
Normally, the frequency reference selected in b1-01 is the PID target value, but you can also set the PID target
value as shown in the following table.
PID Feedback Input Methods
Select one of the following PID control feedback input methods.
Set Value
Control Method
1
PID output becomes the Drive output frequency, and D control is used in the difference between PID tar-
get value and feedback value.
2
PID output becomes the Drive output frequency, and D control is used in the PID feedback value.
3
PID output is added as compensation value of the Drive output frequency, and D control is used in the
difference between PID target value and feedback value.
4
PID output is added as compensation value of the Drive output frequency, and D control is used in the
PID feedback value.
PID Target Input Method
Setting Conditions
Multi-Function Analog Ter-
minal A2 Input
Set H3-05 or H3-09 to C (PID target value). Also, be sure to set H6-01 (pulse train input
function selection) to 1 (PID feedback value).
MODBUS register 0006H
Set MODBUS bit 1 in register address 000FH to 1 to be able to use register number
0006H as the PID target value.
Pulse train input
Set H6-01 to 2 (PID target value).
Input Method
Setting Conditions
Multi-function analog input
Set H3-09 (Multi-function Analog Input Terminal A2 Selection) or H3-05 (Multi-func-
tion Analog Input Terminal A3 Function Selection) to B (PID feedback).
Pulse train input
Set H6-01 to 1 (PID feedback).
INFO
Adjust PID target value and PID feedback value using the following items.
• Analog input: Adjust using the analog input terminal gain and bias.
• Pulse train input: Adjust using pulse train scaling, pulse train input gain, and pulse train input bias.