Yaskawa G7 Drive User Manual
Page 317
6
-100
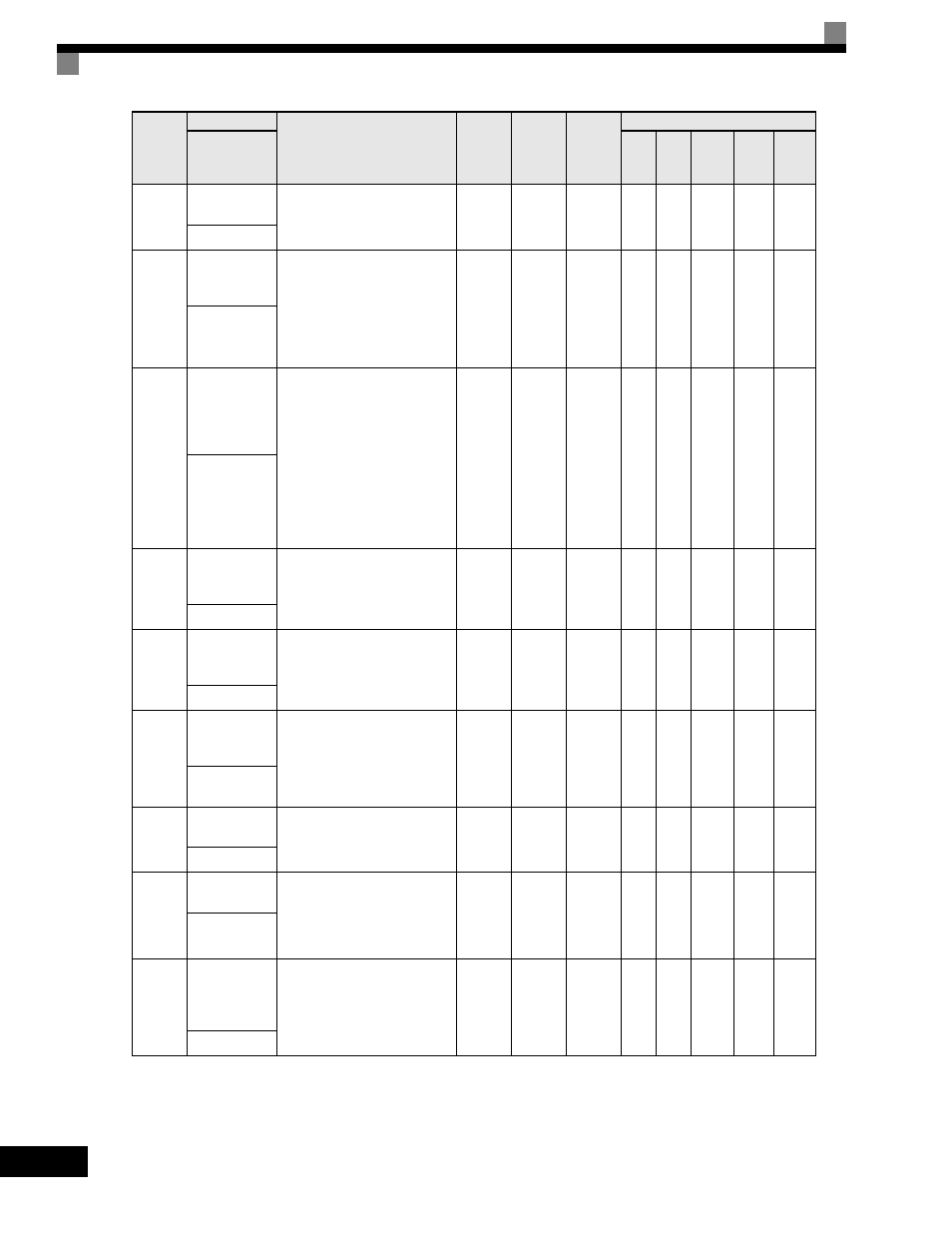
b5-10
PID Output
Gain Setting
Sets the output gain of the PID
controller.
0.0
to
25.0
1.0
No
A
A
A
A
A
Output Gain
b5-11
PID Output
Reverse
Selection
0: Zero Limit (when PID output
goes negative, Drive stops).
Zero Limit is automatic when
reverse prohibit is selected
using b1-04.
1: Reverse (when PID goes
negative, Drive reverses).
0 to 1
0
No
A
A
A
A
A
Output Rev Sel
b5-12
PID Feedback
Reference
Missing
Detection
Selection
0: Disabled (no detection of loss
of PID feedback)
1: Alarm (detection of loss of
PID feedback, operation
continues during detection
with the fault contact not
energized)
2: Fault (detection of loss of PID
feeedback, coast to stop
during detection and fault
contact energizes)
0 to 2
0
No
A
A
A
A
A
Fb los Det Sel
b5-13
PID Feedback
Loss Detection
Level
Sets the PID feedback loss
detection level as a percentage
(%) of maximum frequency
(E1-04).
0 to 100
0%
No
A
A
A
A
A
Fb los Det Lvl
b5-14
PID Feedback
Loss Detection
Time
Sets the PID feedback loss
detection delay time in terms of
seconds.
0.0
to
25.5
1.0sec
No
A
A
A
A
A
Fb los Det Time
b5-15
PID Sleep
Function Start
Level
Sets the sleep function start
frequency.
Note: Enabled even when PID
control mode has not been
selected.
0.0
to
400.0
0.0Hz
No
A
A
A
A
A
PID Sleep
Level
b5-16
PID Sleep
Delay Time
Sets the sleep function delay time
in terms of 0.1 seconds.
0.0
to
25.5
0.0sec
No
A
A
A
A
A
PID Sleep Time
b5-17
PID Accel/
Decel Time
Applies an accel/decel time to the
PID setpoint reference. The
Drive's standard softstarter
(C1-xx and S-curve) still affects
the output of the PID algorithm.
0.0
to
25.5
0.0sec
No
A
A
A
A
A
PID SFS Time
H6-01
Terminal RP
Pulse Train
Input Function
Selection
Selects the function of pulse train
terminal RP.
0: Frequency reference
1: PID feedback value
2: PID setpoint value
0 to 2
0
No
A
A
A
A
A
Pulse Input Sel
Parameter
Number
Name
Description
Setting
Range
Factory
Setting
Change
during
Operation
Control Methods
Display
V/f
V/f
with
PG
Open
Loop
Vector
1
Flux
Vector
Open
Loop
Vector
2