Setting precautions – Yaskawa G7 Drive User Manual
Page 321
6
-104
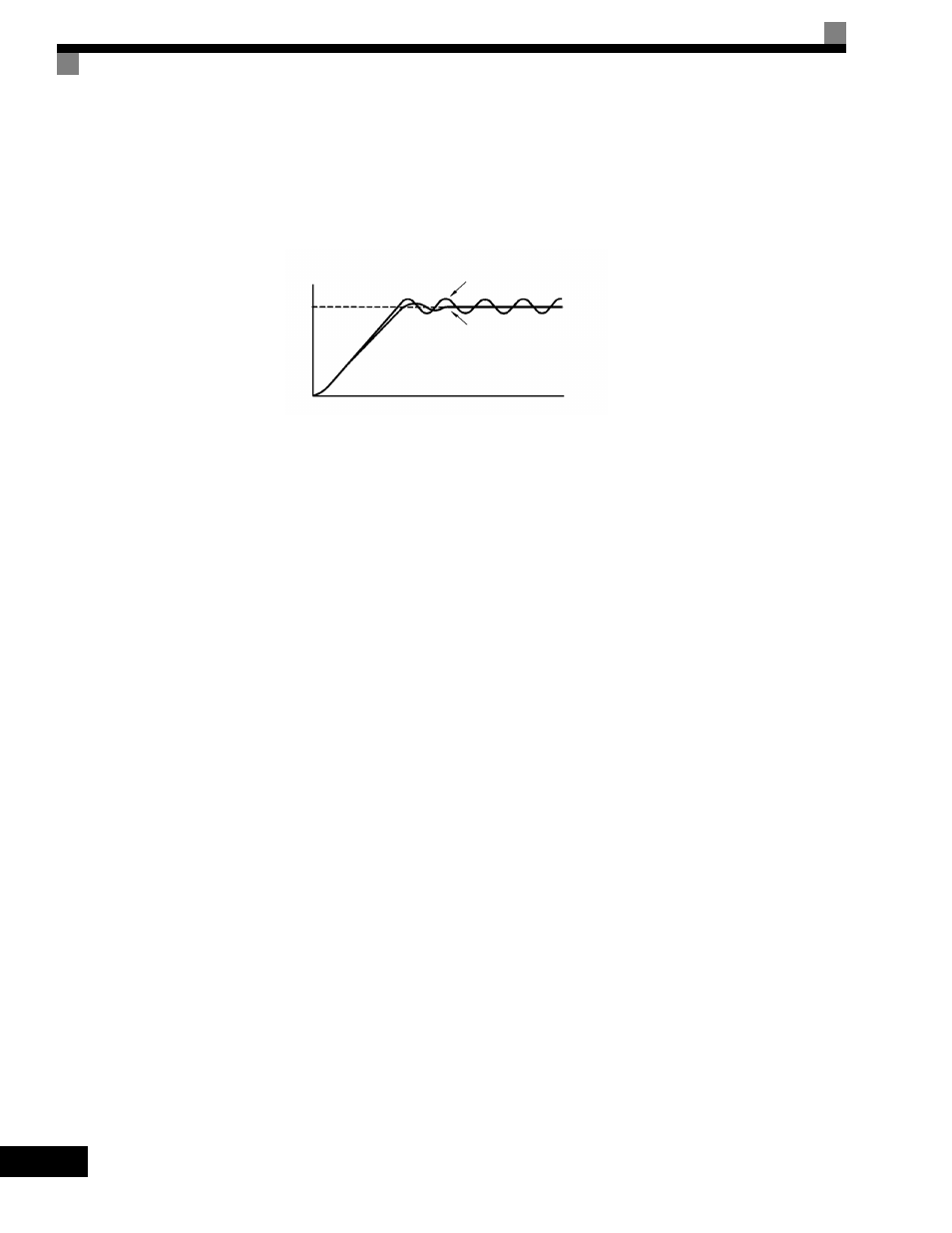
Suppressing Short Cycle Vibration
If vibration occurs when the vibration cycle is short, and the cycle is almost identical to the derivative time (D)
set value, the differential operation is too strong. Shorten the derivative time (D) to suppress the vibration.
If vibration continues even when the derivative time (D) is set to 0.00 (D control disabled), reduce the propor-
tional gain (P), or increase the PID primary delay time constant.
Setting Precautions
•
In PID control, the b5-04 parameter is used to prevent the calculated integral control value from exceeding
a specified amount. When the load varies rapidly, Drive response is delayed, and the machine may be dam-
aged or the motor may stall. In this case, reduce the set value to speed up Drive response.
•
The b5-06 parameter is used to prevent the arithmetic operation following the PID control calculation from
exceeding a specified amount. Set taking the maximum output frequency to be 100%.
•
The b5-07 parameter is used to adjust PID control offset. Set in increments of 0.1%, taking the maximum
output frequency to be 100%.
•
Set the low pass filter time constant for the PID control output in b5-08. Enable this parameter to prevent
machinery resonance from occurring when machinery adhesive abrasion is great, or rigidity is poor. In this
case, set the parameter to be greater than the resonance frequency cycle. Increase this time constant to
reduce Drive responsiveness.
•
Using b5-09, you can invert the PID output polarity. Consequently, if you increase the PID target value,
you can apply this parameter to applications to lower the Drive output frequency.
•
Using b5-10, you can apply gain to the PID control output. Enable this parameter to adjust the amount of
compensation if adding PID control output to the frequency reference as compensation.
•
When PID control output is negative, you can use parameter b5-11 to invert the Drive. When b1-04 (Prohi-
bition of Reverse Operation) is set to 1 (enabled), however, PID output limit is 0.
•
With the Drive, by setting an independent acceleration/deceleration time in parameter b5-17, you can
increase or decrease the PID target value using the acceleration/deceleration time. The acceleration/
deceleration function (parameter C1) used normally, however, is allocated after PID control, so depending
on the settings, resonance with PID control and hunting in the machinery may occur. If this happens,
reduce parameter C1 until hunting does not occur, and maintain the acceleration/deceleration time using
b5-17. Also, you can disable the set value in b5-17 from the external terminals during operation using
multi-function input set value 34 (PID soft starter).
Response
Before adjustment
After adjustment
Time