4 speed control (asr) structure – Yaskawa G5HHP Drive User Manual
Page 151
6.4 Flux Vector Control
6 - 33
Fault Display
Remedy
Probable Cause
Motor Direction Fault
(Motor direction fault)
----
There is a faulty connection
between the Inverter and PC
(A or B phase) or the Inverter
and Motor (U, V, or W
phase).
S
Check the PG wiring.
S
Check the motor wiring.
S
Check the PG rotation direction and
constant F1-05.
PG Circuit Fault
PGO: PG break detected)
Pulses aren’t being input
from the PG even though a
rotation output is being sent
to the motor.
S
The cable to the PG is bro-
ken/disconnected.
S
The PG’s power supply is
broken/disconnected.
Check the wiring and correct any problems.
Tune Aborted
Minor Fault:
---
A minor Inverter fault oc-
curred.
Check the minor fault indicated in the boxes
in the display shown at the left.
Tune Aborted
V/f Over Setting
(Displayed after completion of
Torque reference exceeded
100%, and no--load current
Rated voltage and rated fre-
quency settings are not cor-
rect.
Check the setting and correct any problems.
(Displayed after completion of
autotuning)
100%, and no--load current
exceeded 70%.
The load is connected to the
motor.
Disconnect the motor from the load.
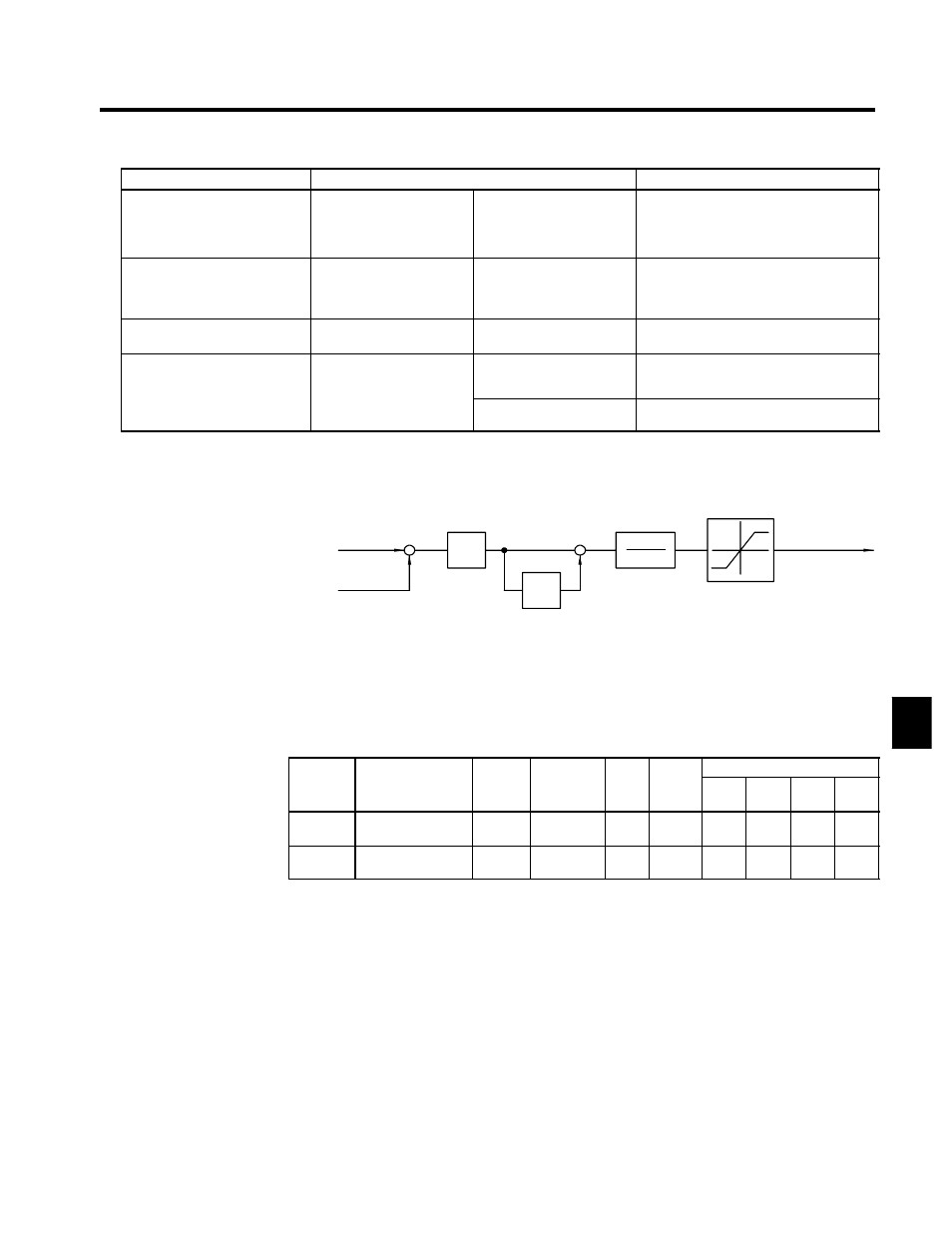
6.4.4 Speed Control (ASR) Structure
D
The following block diagram shows the structure of the speed control.
Frequency
reference
--
C5-01, C5-03
P
I
+
+
Torque limits
Secondary cur-
rent reference
C5-02, C5-04
C5-06
L7-01 to L7-04
Detected
speed
+
In vector flux control, the ASR’s P gain is the maximum frequency standard.
1
1 + sT
Fig 6.14
Speed Control Structure
J
Gain Settings: C5-01, C5-02
D
Set the proportional gain and the integral time of the speed control (ASR).
User
Change
during
Setting
Factory
Valid Access Levels
User
Constant
Number
Name
g
during
Opera-
tion
Setting
Range
Unit
Factory
Setting
V/f
Control
V/f with
PG
Open
Loop
Vector
Flux
Vector
C5-01
ASR proportional
(P) gain 1
f
0.00 to
300.00
Multi-
ple
20.00
x
B
x
B
C5-02
ASR integral (I)
time 1
f
0.000 to
10.000
s
0.500
x
B
x
B
J
Low-speed Gain Settings: C5-03, C5-04, C5-07
D
Use these constants to set different proportional gain and integral time settings for low-speed operation.
Constant C5-03 sets the low-speed proportional gain of the speed loop (ASR), and C5-04 sets the low-
speed integral time.
D
Set constant C5-07 to the frequency at which to switch to the low-speed ASR proportional gain and inte-
gral time.
6