S-curve acceleration/deceleration: c2, Motor slip compensation: c3 – Yaskawa G5HHP Drive User Manual
Page 277
8.2 Programming Mode Constants
8 - 11
J
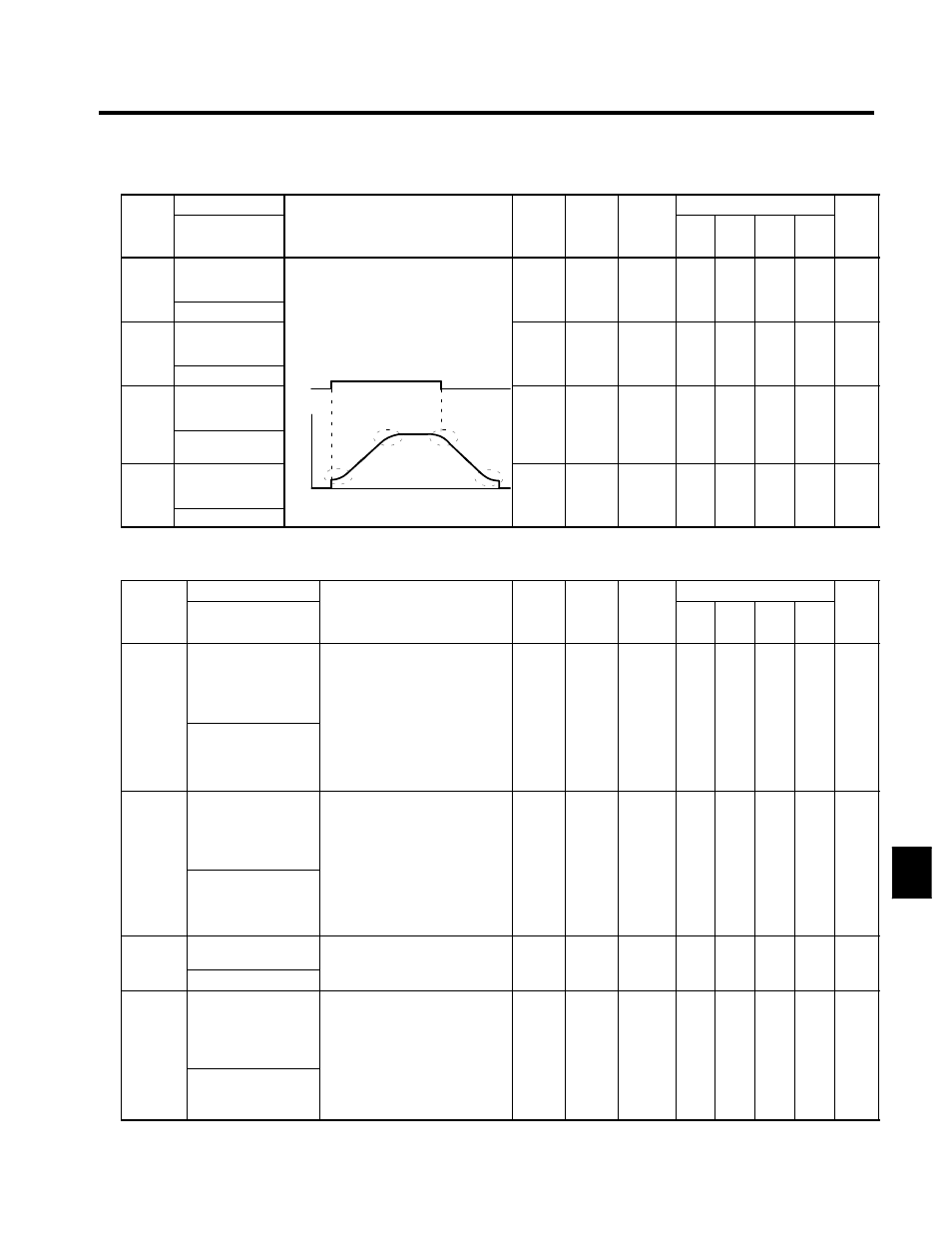
S-curve Acceleration/Deceleration: C2
Consta
Name
S tti
F t
Change
Control Methods
Consta
nt
Num-
ber
Display
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
V/f
V/f
with
PG
Open
Loop
Vector
Flux
Vector
Page
C2-01
S-curve charac-
teristic time at ac-
celeration start
All sections of the S-curve characteristic
time are set in seconds units
0.0 to
2.50
0.20
x
A
A
A
A
7 - 50
SCrv Acc @ Start
time are set in seconds units.
;
When the S-curve characteristic time is
2.50
C2-02
S-curve charac-
teristic time at ac-
celeration end
;
When the S-curve characteristic time is
set, the accel/decel times will increase
by only half of the S-curve characteris-
tic times at start and end.
0.0 to
2.50
0.20
x
A
A
A
A
7 - 50
SCrv Acc @ End
tic times at start and end.
Run com-
ON
OFF
2.50
C2-03
S-curve charac-
teristic time at de-
celeration start
Output frequency
C1-02
C1-03
Run com-
mand
ON
OFF
0.00 to
2 50
0.20
x
A
A
A
A
7 - 50
C2 03
SCrv Dec @
Start
C1-01
C1 03
C1-04
2.50
0.20
x
A
A
A
A
7 - 50
C2-04
S-curve charac-
teristic time at de-
celeration end
C1-01
C1-04
Time
0.00 to
2.50
0.00
x
A
A
A
A
7 - 50
SCrv Dec @ End
2.50
J
Motor Slip Compensation: C3
C
t t
Name
S tti
F t
Change
Control Methods
Constant
Number
Display
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
V/f
V/f
with
PG
Open
Loop
Vector
Flux
Vector
Page
C3-01
Slip compensation
gain
Used to improve speed accuracy
when operating with a load.
;
Usually setting is not necessary.
When actual speed is low, in-
crease the set value.
When actual speed is high, de-
0.0 to
2 5
1.0 *
f
B
x
B
B
7 - 32
7 50
C3 01
Slip Comp Gain
When actual speed is high, de-
crease the set value.
In flux vector control mode this
function becomes gain to com-
pensate for slip caused by tem-
perature variation.
2.5
1.0
f
B
x
B
B
7 - 50
C3-02
Slip compensation
primary delay time
Slip compensation primary delay
time is set in ms units.
;
Usually setting is not necessary.
Adjust when slip compensation
responsiveness is low, or speed is
not stabilized
0 to
10000
200 *
x
A
x
A
x
7 - 51
C3 02
Slip Comp Time
not stabilized.
When responsiveness is low, de-
crease the set value.
When speed is not stabilized, in-
crease the set value.
10000
200
x
A
x
A
x
7 - 51
C3-03
Slip compensation
limit
Sets the slip compensation limit as
a percentage of motor rated slip
0 to 250
200
x
A
x
A
x
7 - 51
C3 03
Slip Comp Limit
a percentage of motor rated slip.
0 to 250
200
x
A
x
A
x
7 - 51
C3-04
Slip compensation
selection during re-
generation
0: Disabled.
1: Enabled.
;
When the slip compensation dur-
ing regeneration function has
been activated, as regeneration
it i
t il
0, 1
0
x
A
x
A
x
7 - 51
Slip Comp Regen
been activated, as regeneration
capacity increases momentarily,
it may be necessary to use a
braking option (Braking Resistor
Unit or Braking Unit.)
8