5 torque limit function, Torque reference and torque limit, Stopping method – Yaskawa G5HHP Drive User Manual
Page 191
7.3 Flux Vector Control
7 - 27
J
Torque Reference and Torque Limit
If the torque reference has been assigned to a multi-function analog input or the frequency reference (cur-
rent) terminal, the input function changes when the control mode is switched between torque control and
speed control.
D
During speed control: The analog input terminal is used as the torque limit input.
D
During torque control: The analog input terminal is used as the torque reference input.
Either the absolute value of the torque limit input or the torque limit constant setting (L7-01 to L7-04),
whichever is smaller, will be used for the torque limit. Refer to 7.3.5 Torque Limit Function.
J
Stopping Method
D
When the run command is turned OFF during speed control, the motor is decelerated to a stop.
When the run command is turned OFF during torque control, the control mode is automatically switched
to speed control and the motor is decelerated to a stop.
D
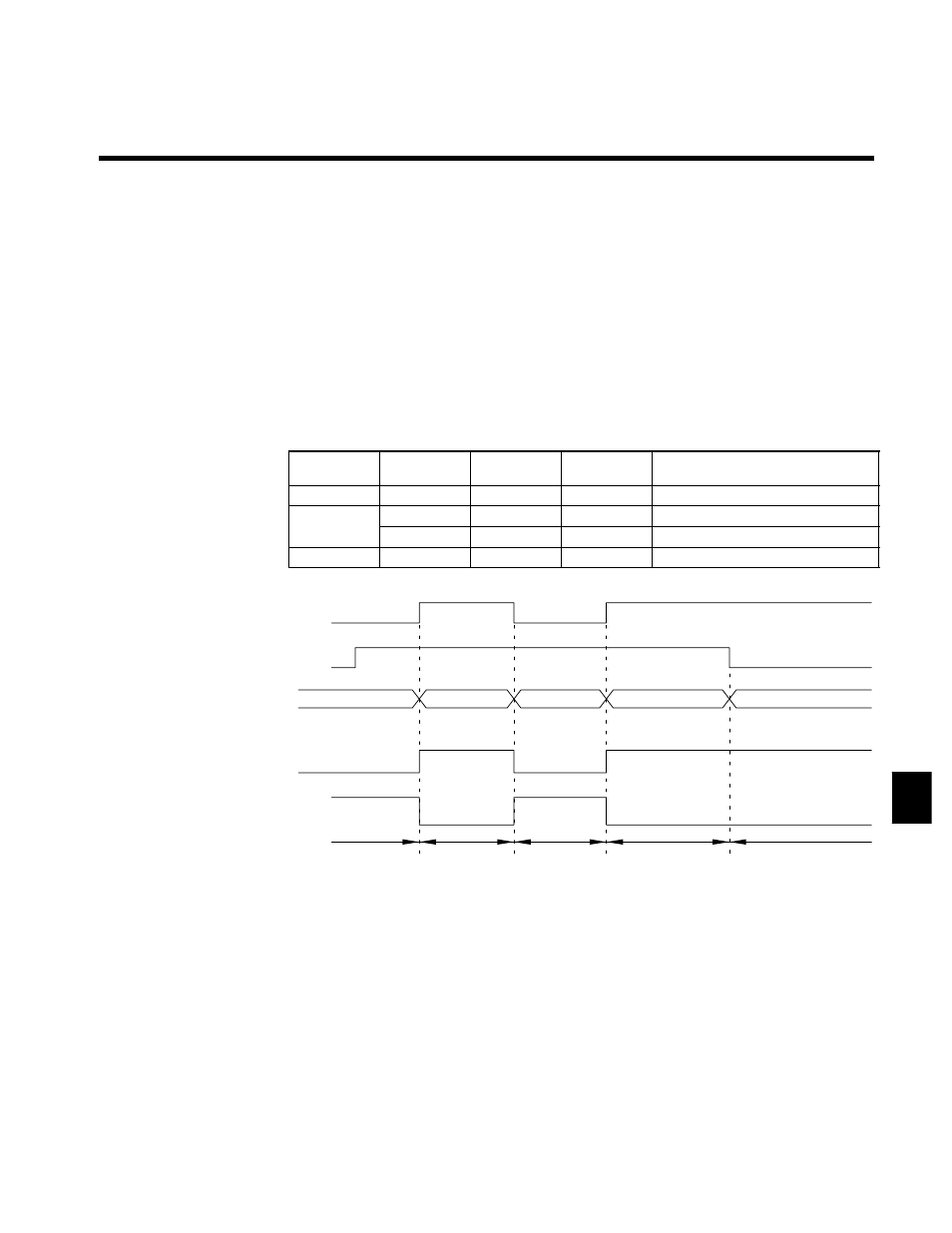
When A1-02 is set to 3 (flux vector control), the speed/torque change command can be set for a multi-
function input (a setting of 71) to switch between speed and torque control during operation. An example
is shown below.
D
Settings
Terminal No.
User
Constant No.
Factor Setting
Setting
Function
16
H1-06
8
71
Speed/torque control change
36
b1-01
1
1
Frequency source (terminals 36, 39)
36
d5-03
1
1
Speed limit (terminals 36, 39)
42
H3-05
1
13
Torque reference/torque limit
Speed/torque change sig-
nal (terminal 16 input)
Run command
Control mode
Terminal 36 input
OPEN
CLOSED
Stop
Run
Speed
Torque
Speed (decel to stop)
Speed limit
Torque limit
Torque
reference
OPEN
CLOSED
Speed
Torque
Torque limit
Torque
reference
Speed
reference
Speed
reference
Speed limit
c
d
d
c
e
Terminal 42 input
Fig 7.13
Switching between Speed and Torque Control
7.3.5 Torque Limit Function
With flux vector control, the torque limit can be applied at an arbitrary value because the torque output by
the motor is calculated internally.
The torque limit function is useful when the load cannot sustain a torque above a certain level or regenerative
torque above a certain level.
The two ways to apply a torque limit are listed below.
D
Setting torque limits with the constants
D
Limiting torque with the analog inputs
The lower torque limit will be used if both of these methods are set. The accuracy of the torque limit is ±5%
at all frequencies.
7