5 options constants: f, Pg option setup: f1 – Yaskawa G5HHP Drive User Manual
Page 289
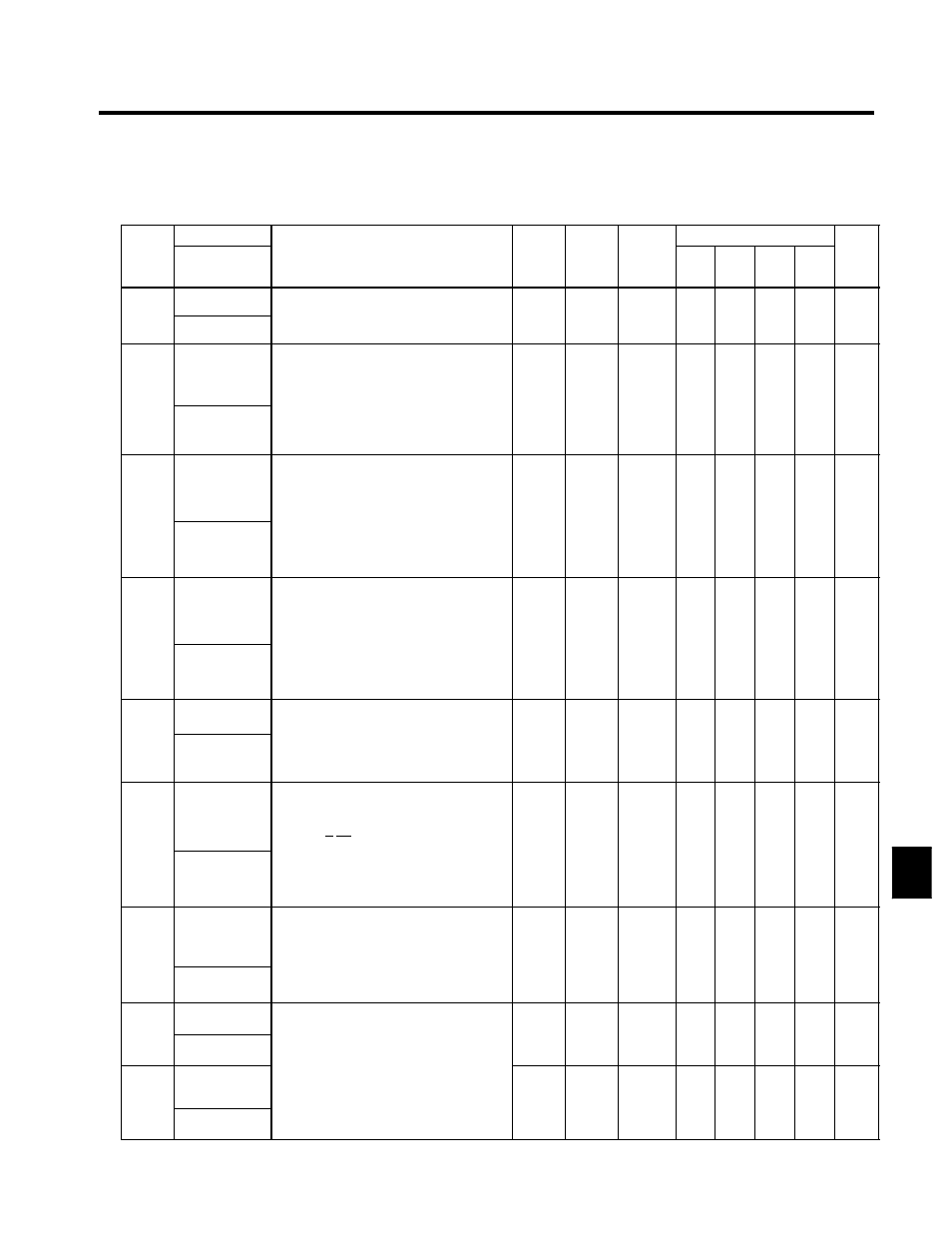
8.2 Programming Mode Constants
8 - 23
8.2.5 Options Constants: F
J
PG Option Setup: F1
Consta
Name
S tti
F t
Change
Control Methods
Consta
nt
Num-
ber
Display
Description
Setting
Range
Factory
Setting
Change
during
Opera-
tion
V/f
V/f
with
PG
Open
Loop
Vector
Flux
Vector
Page
F1-01
PG constant
Sets the number of PG (pulse generator or
encoder) pulses.
0 to
600
x
x
Q
x
Q
6 - 26
F1-01
PG Pulse/Rev
encoder) pulses.
;
Sets the number of pulses per motor revo-
lution.
0 to
60000
600
x
x
Q
x
Q
6 26
6 - 41
F1-02
Operation
selection at PG
open circuit
Sets the PG disconnection stopping method.
0: Ramp to stop (Deceleration stop using
deceleration time 1, C1-02.)
1: Coast to stop
2 F t t
(E
t
i
th f t
0 to 3
1
x
x
B
x
B
6 - 27
6 42
F1 02
PG Fdbk Loss
Sel
2: Fast stop (Emergency stop using the fast-
stop time, C1-09.)
3: Continue operation (PGO is displayed,
and continues operation.)
0 to 3
1
x
x
B
x
B
6 - 42
F1-03
Operation
selection at
overspeed
Sets the stopping method when an overspeed
(os) fault occurs.
0: Ramp to stop (Deceleration stop using
deceleration time 1, C1-02.)
1: Coast to stop
0 to 3
1
x
x
B
x
B
6 - 28
6 42
F1 03
PG Overspeed
Sel
1: Coast to stop
2: Fast stop (Emergency stop using the fast-
stop time, C1-09.)
3: Continue operation (OS is displayed, and
continues operation.)
0 to 3
1
x
x
B
x
B
6 - 42
F1-04
Operation
selection at
deviation
Sets the stopping method when a speed devi-
ation (DEV) fault occurs.
0: Ramp to stop (Deceleration stop using
deceleration time 1, C1-02.)
1: Coast to stop
0 to 3
3
x
x
B
x
B
6 - 28
6 42
F1 04
PG Deviation
Sel
1: Coast to stop
2: Fast stop (Emergency stop using the fast-
stop time, C1-09.)
3: Continue operation (DEV is displayed
and continues operation.)
0 to 3
3
x
x
B
x
B
6 - 42
PG rotation
0: Phase A leads with forward run com-
mand. (Phase B leads with reverse run
command )
F1-05
PG Rotation
Sel
command.)
1: Phase B leads with forward run com-
mand. (Phase A leads with reverse run
command.)
0, 1
0
x
x
B
x
B
6 - 26
F1-06
PG division
rate (PG pulse
monitor)
Sets the division ratio for the PG speed con-
trol card pulse output.
Division ratio = (1+ n) /m (n=0,1 m=1 to 32)
F1--06 = h hh
n m
1 to 132
1
x
x
B
x
B
6 - 27
F1 06
PG Output Ra-
tio
n m
;
This constant is only effective when a
PG-B2 is used.
The possible division ratio settings are:
1/32≦F1-06≦1.
1 to 132
1
x
x
B
x
B
6 - 27
F1-07
Integral value
during accel/
decel enable/
disable
Sets integral control during acceleration/de-
celeration to either enabled or disabled.
0: Disabled (The integral function isn’t used
while accelerating or decelerating; it is
used at constant speeds )
0, 1
0
x
x
B
x
x
6 - 41
PG Ramp PI/I
Sel
used at constant speeds.)
1: Enabled (The integral function is used at
all times.)
F1-08
Overspeed
detection level
0 to 120
115
x
x
A
x
A
6 - 28
F1-08
PG Overspd
level
Sets the overspeed detection method.
Frequencies above that set for F1-08 (set as a
percentage of the maximum output frequen
0 to 120
115
x
x
A
x
A
6 28
6 - 42
F1-09
Overspeed
detection delay
time
q
(
percentage of the maximum output frequen-
cy), which continue to exceed this frequency
for the detection time (F1-09), are detected as
overspeed faults.
0.0 to
2 0
0.0 *
x
x
A
x
A
6 - 28
6 42
F1 09
PG Overspd
Time
overspeed faults.
2.0
0.0
x
x
A
x
A
6 - 42
8