2 using dynamic brake – Yaskawa SGDB User Manual
Page 118
APPLICATIONS OF Σ-SERIES PRODUCTS
3.4.2 Using Dynamic Brake
106
For detailed adjustment procedures, refer to the following sections.
Adjustment Method
Automatic adjustment of reference
offset
Section 4.2.4 Reference Offset Automatic Adjustment
Manual adjustment of reference
offset
Section 4.2.5 Reference Offset Manual Adjustment
Mode
3.4.2 Using Dynamic Brake
To stop the servomotor by applying dynamic brake (DB), set desired values in the fol-
lowing memory switch. If dynamic brake is not used, the servomotor will stop naturally
due to machine friction.
Cn-01Bit 6
How to Stop Motor When
Servo is Turned OFF
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Cn-01Bit 7
Operation to Be Performed
When Motor Stops After
Servo is Turned OFF
For Speed/Torque Control
and Position Control
The SERVOPACK enters servo OFF status when:
• Servo ON input signal (/S-ON, 1CN-40) is
turned OFF
• Servo alarm arises
• Power is turned OFF
Specify how to stop the motor when one of the
above events occurs during operation.
Setting
Meaning
0
Stops the motor by dynamic brake.
Cn-01 bit 6
1
Causes the motor to coast to a stop.
The motor power is OFF and stops due to machine friction.
If dynamic brake stop mode is selected, specify the operation to be performed when
the motor stops.
Setting
Meaning
Cn 01 bit 7
0
Releases dynamic brake after the motor stops.
Cn-01 bit 7
1
Does not release dynamic brake even after the motor stop.
For 2.0 kW type, bit 7 of Cn-01 can be set to 0 only.
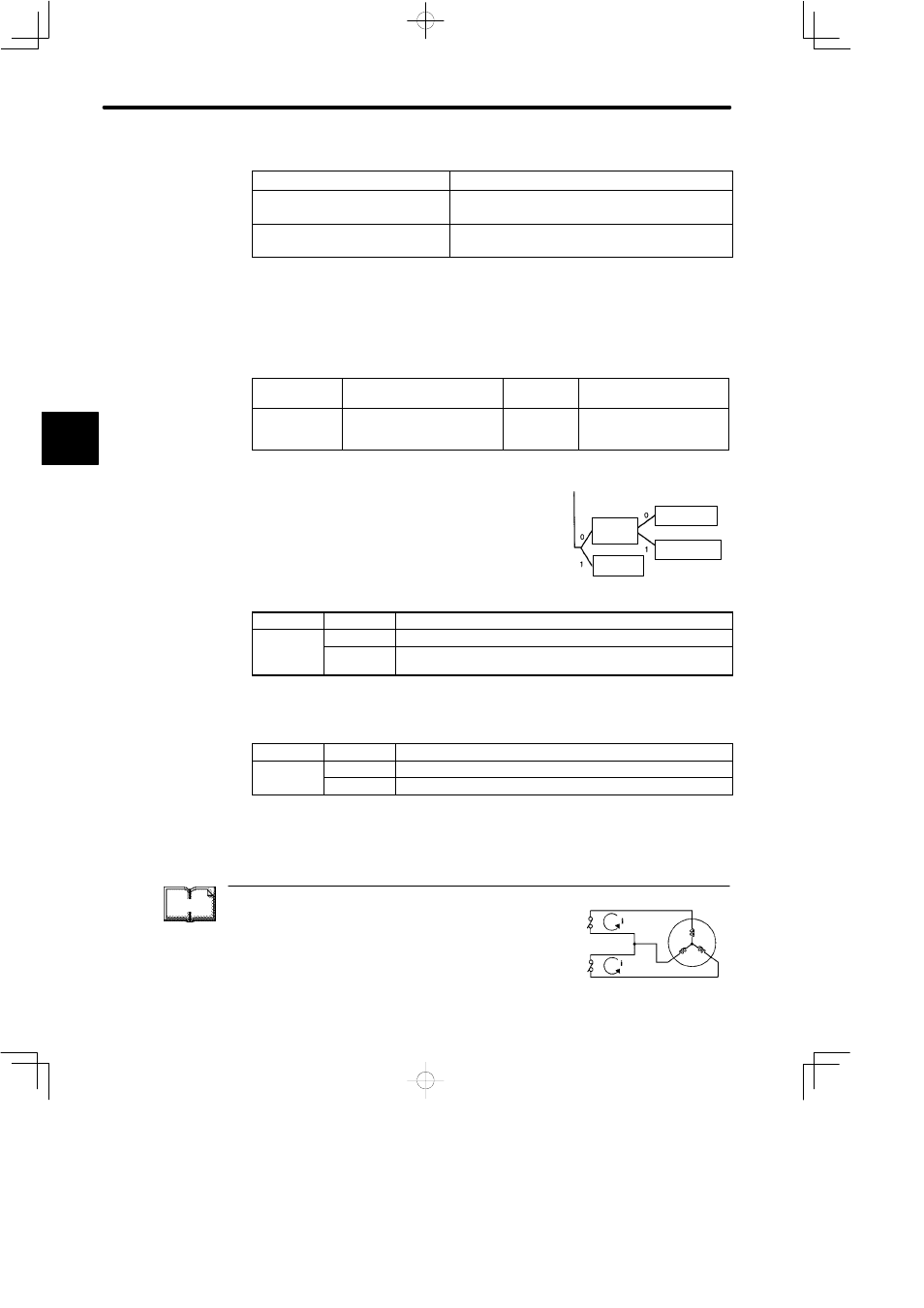
TERMS
Dynamic brake (DB)
One of the general methods to cause a motor sudden stop.
“Dynamic brake” suddenly stops a servomotor by shorting its
electrical circuit.
This dynamic brake circuit is incorporated in the SERVOPACK.
SERVOPACK
Servomotor
3
Servo OFF
Stop mode
Stop by
dynamic
brake
After stop
Releasing
dynamic brake
Bit 7
Holding
dynamic brake
Bit 6
Coasting
to a stop