6 using mode switch – Yaskawa SGDB User Manual
Page 133
3.6 Minimizing Positioning Time
121
3.6.6 Using Mode Switch
Use the mode switch for the following purposes:
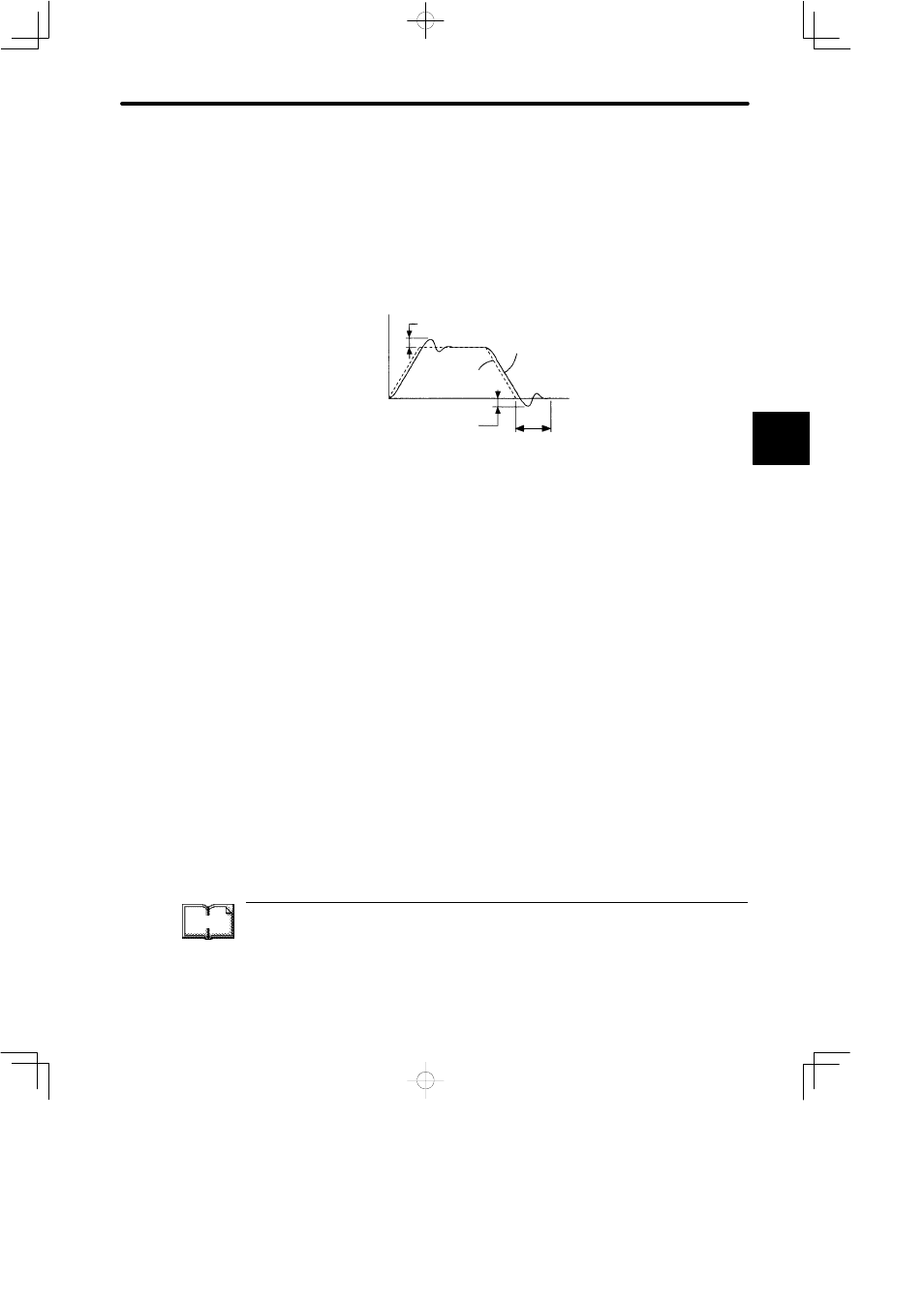
• To prevent overshoot during acceleration or deceleration (for speed control).
• To prevent undershoot during positioning in order to reduce settling time (for position
control).
Speed
Overshoot
Actual motor
operation
Reference
Time
Undershoot
Settling time
In other words, the mode switch is a function that automatically switches the speed con-
trol mode inside the SERVOPACK from PI control to P control while certain conditions
are being established.
NOTE
The mode switch is used to fully utilize performance of a servo drive to achieve very high-
speed positioning. The speed response waveform must be observed to adjust the mode
switch.
For normal use, the speed loop gain and position loop gain set by autotuning provide suf-
ficient speed/position control.
Even if overshoot or undershoot occurs, they can be suppressed by setting the accelera-
tion/deceleration time constant for the host controller, the soft start time constants
(Cn-07, Cn-23), or smoothing time constant (Cn-26) for the SERVOPACK.
TERMS
From PI control to P control
PI control means proportional/integral control and P control means proportional control. In
short, switching “from PI control to P control” reduces effective servo gain, making the servo
system more stable.
3