3 how to use the sgdb servopacks – Yaskawa SGDB User Manual
Page 24
FOR FIRST-TIME USERS OF AC SERVOS
1.3.3 How to Use the SGDB SERVOPACKs
12
1.3.3 How to Use the SGDB SERVOPACKs
J
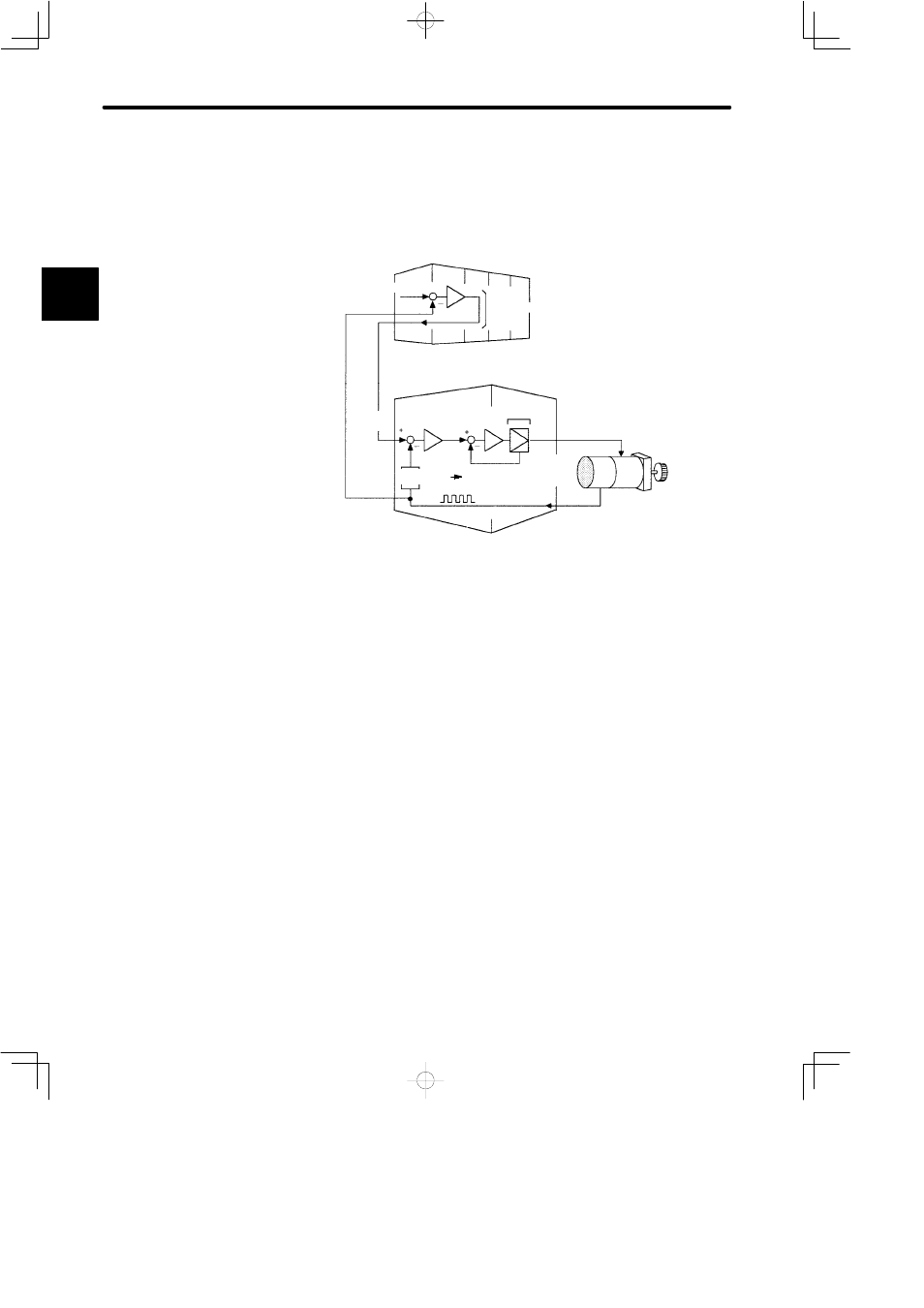
Using SERVOPACK for Speed Control
The most common use of a SERVOPACK for speed control is shown below:
Host controller
Position reference +
Speed
reference
Power
amplifier
(Analog
voltage)
Position
Convert
Torque
(current)
feedback
Pulse train
Servomotor
Position feedback
Encoder
Position control loop
Position
feedback
Speed
SERVOPACK
(speed control mode)
As shown in the above figure, a position control loop is formed in the host controller. The
host controller compares a position reference with a position feedback signal and sends
the processed result to the SERVOPACK as a speed reference.
In this way the host controller can be freed from performing the servo mechanism control.
The SERVOPACK undertakes the speed control loop and subsequent control proces-
sing.
The Yaskawa programmable machine controller MP920 is used as a typical host control-
ler.
1