Yaskawa SGDB User Manual
Page 242
USING THE DIGITAL OPERATOR
5.1.1 Selecting a Servomotor cont.
232
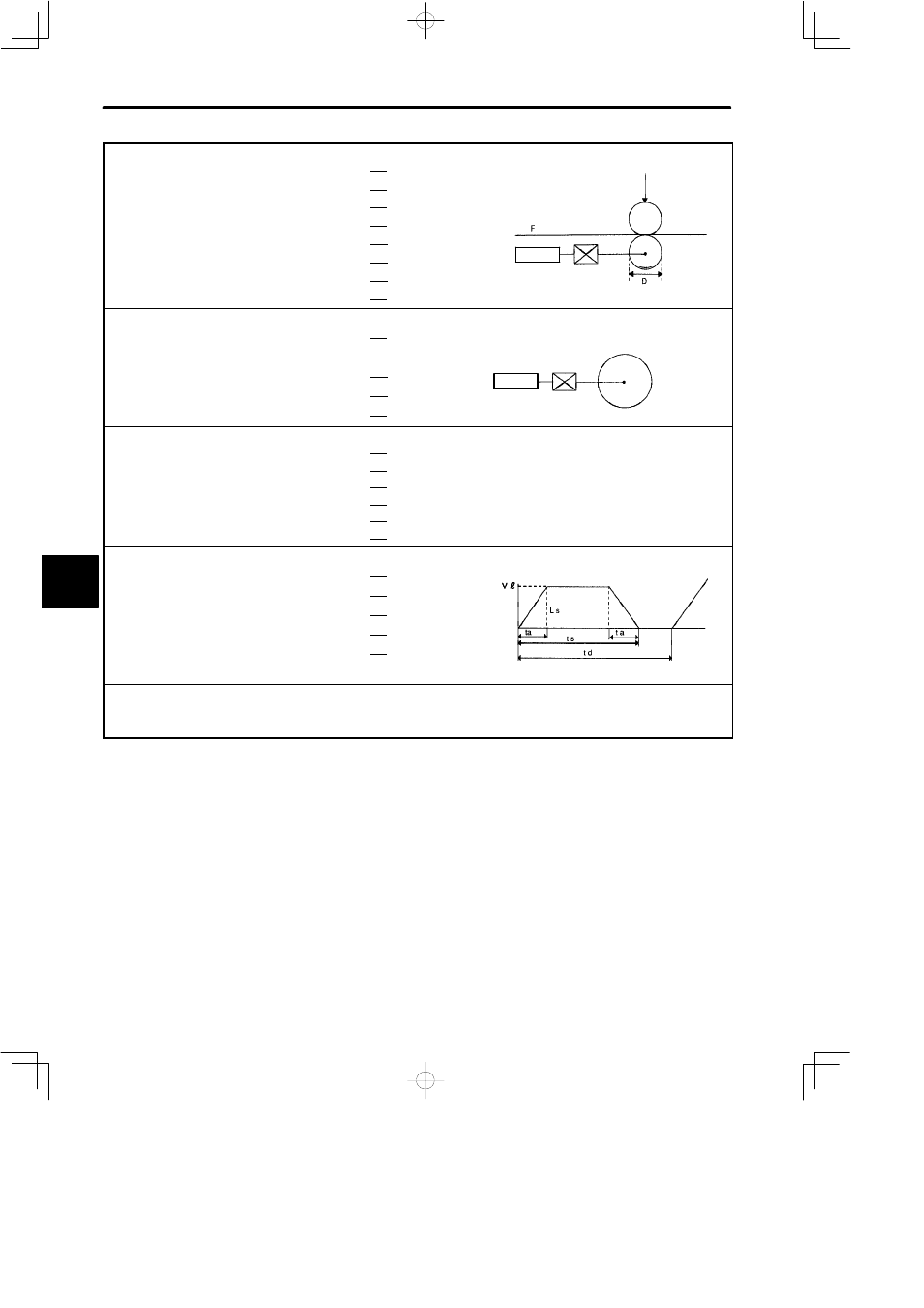
Roll Feeder
P
f
Load J
Jℓ
kg¡cm
2
(lb¡in
2
.)
Press force
Tension
F
kg (lb)
Press force
P
kg (lb)
Roller
Roller diameter
D
mm (in.)
Roller
Coefficient of friction
µ
Motor
Overall efficiency
η
G
li
Motor
Jℓ
Gear ratio
R (= Nm/Nl)
Gear+coupling
GD
2
g
Gear+coupling
Jg
kg¡cm
2
(lb¡in
2
.)
GD
2
g
Rotor
Load J
Jℓ
kg¡cm
2
(lb¡in
2
.)
Load torque
Tℓ
kg¡cm
2
(lb¡in
2
.)
T ℓ
Overall efficiency
η
Motor
Gear ratio
R (= Nm/Nl)
Gear+coupling
Motor
Jℓ
Gear+coupling
Jg
kg¡cm
2
(lb¡in
2
.)
Gear+coupling
Jg
Others
Load J
Jℓ
kg¡cm
2
(lb¡in
2
.)
Load torque
Tℓ
kg¡cm
2
(lb¡in
2
.)
Motor speed
Nm
min
−1
DUTY
td
s
Positioning time
ts
s
Accel/decel time
ta
s
Duty cycle
DUTY
td
s
Positioning distance
Ls
mm (in.)
Moving member speed
Vℓ
m/min
Positioning time
ts
s
Accel/decel time
ta
s
Enter either Vℓ or ts. If both are entered, specify priority.
Operating environment
D
Operating temperature
D
Other
*1
J (inertia) of Table W (load weight) and J (inertia) of the motor are automatically calcu-
lated by the servomotor sizing software.
*2
Gear ratio R = Nm/N
ℓ
= motor-speed/load-speed
*3
Gear+coupling J g: J of gear or coupling
This is J of the joint (including a gear) between the motor and the load (machine).
5