Yaskawa SGDB User Manual
Page 75
3.1 Setting Parameters According to Machine Characteristics
63
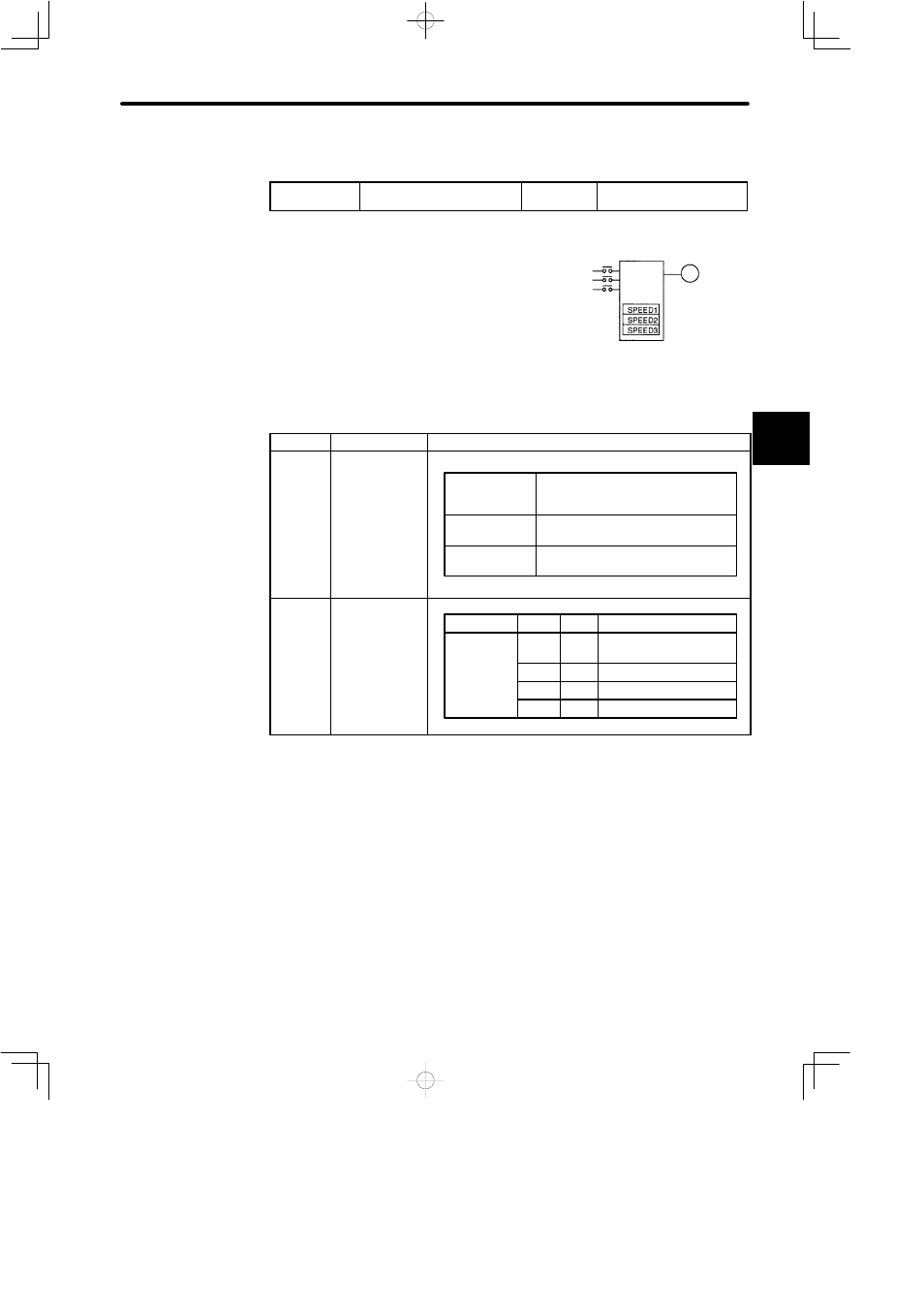
To use /P-CL and /N-CL as torque limit input signals, set the following constant.
Cn-2B
Control Mode Selection
Factory
Setting: 0
For Speed/Torque Control
and Position Control
Prohibits the contact input speed control function.
If the contact input speed control function is used,
the contents of the input signals shown below will
change.
After this memory switch is reset, the meanings of the following signals will also
change:
Monitor mode (Un-05) bit 7 and bit 8
Setting
Meaning
Input Signal
0, 1, 2,
7, 8, 9,
10, 11
Does not use
the contact
input speed
control
function.
/P-CON (1CN-41)
Used to switch between P control and
PI control and to perform other
functions.
/P-CL (1CN-45)
Used for forward external torque limit
input
/N-CL (1CN-46)
Used for reverse external torque limit
input
3, 4, 5, 6
Uses the contact
input speed
control function.
0: OFF, 1: ON
/P-CON
/P-CL /N-CL
Speed Setting
Direction of
rotation
0: Forward
1: Reverse
0 reference and so on
Cn-1F (SPEED1)
Cn-20 (SPEED2)
Cn-21 (SPEED3)
0
0
0
1
1
1
1
0
3
SGDB SERVOPACK
Run the
motor at
internally
set speed
Contact
input
SGMj
servomotor